📘
Mimic-IR-UR ユーザーマニュアル
1. 始める前に2. ミミックキットの概要3. ミミックキットとURロボットの接続4. IPアドレスの設定5. UR Capsの接続設定5.1 5.2. 一般的な設定の構成5.3. セットアップ(Setup)の設定5.4. ジョイスティックの設定5.5. ロボットワークスペースの設定5.6. Robot Workspace (ロボットワークスペース)の追加5.7. トランスミッターの設定(EMキットのみ該当)5.8. コンベアの設定(オプション)5.9. 保存した軌跡の管理5.10. 出力の設定5.11. ライセンス5.12. ミミックポインターのTCPのキャリブレーション6. ミミックの使用方法6.0. 出力の取り込み方法6.1. ロボットプログラムノード - ミミックノードの概要6.2. Track(トラック)ノードの使用6.3. Teachノードの使用6.4. Tuneノードの使用6.5. Playノードの使用7. トラブルシューティング
1. 始める前に
1.1. 使用目的
本書は、Nordbo RoboticsのMimicソフトウェアをUniversal Robotsのマニピュレーターにインストールするためのガイドとなります。
本書は、ロボットの動作を開始する前に実施する必要があるリスクアセスメントに関する情報を提供するものではありません。
1.2. 前提条件
本書の内容を理解するためには、使用するマニピュレーターに関連するソフトウェアの基本的な操作方法 を理解していることが必要です。
また、産業用ロボットや協働ロボットを使用する際のリスクについても理解していることが望まれます。
加えて、パソコンの基本的な操作方法、ネットワークの設定方法についても理解していることが望まれます。
1.3. 安全に関する警告
本製品を使用される方は、以下の説明をよくお読みください。
- ロボットにハードウェアを接続する前に、ロボットが不意に動くことがないようにすることが重要です。
そのため、ロボットにセンサーを接続する前に、ロボットの電源を切っておく必要があります。
- ロボットのコントローラーにワイヤーを接続したり、Nordbo Roboticsの製品間でケーブルを接続する際は、必ずロボットの電源を切ってから行ってください。
URのティーチングペンダント上でも、電圧異常のため、非常停止がかかります。
- 落下させると製品が破損する可能性があります。
- ユーザーがケーブルを引っ張ったり、締め過ぎたりするとコネクタが壊れることがありますのでご注意ください。
- センサーは指定された測定範囲内で使用することができます。指定された範囲外でセンサーを使用すると、予期せぬ結果を生む可能性があります。
- Nordbo Roboticsは、本製品の使用による損害や負傷について、一切の責任を負いかねます。
2. ミミックキットの概要
2.1. 一目でわかるMimic
Mimicは、トラッキングデバイスを利用してユーザーの動きを追跡し、自動化が困難な複雑な動きの記録と再現を可能にするソフトウェアです。
Mimicは位置と方向の両方を記録するため、プログラミングや再プログラミングに費やす時間を大幅に削減することができます。
MimicはUniversal Robotsに簡単にインストールできるように作られたURCapで、Nordbo Roboticsのトラッキングキットと一緒に動作します。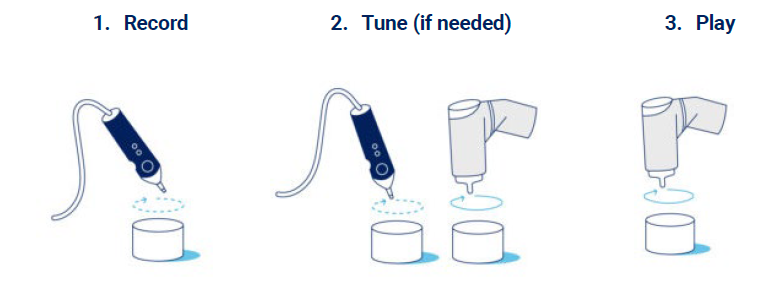
3. ミミックキットとURロボットの接続
3.1. MimicトラッカーとURロボットを接続する
Mimicは様々なトラッキング技術に対応しています。
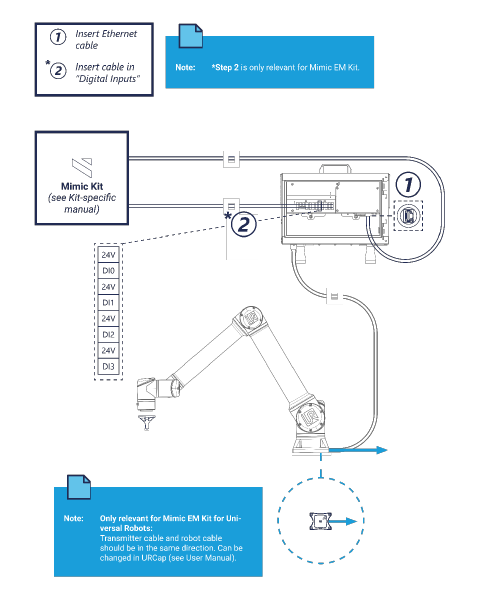
図1は、MimicをURロボットに接続する手順を示しています。
特定のMimicハードウェアのセットアップに関する詳細は、Tracker-specific Kit Manualを参照してください。
キットをロボットに接続するには、デジタル入力への電気配線の基本的な理解が必要です。
4. IPアドレスの設定
4.1. 操作の概要
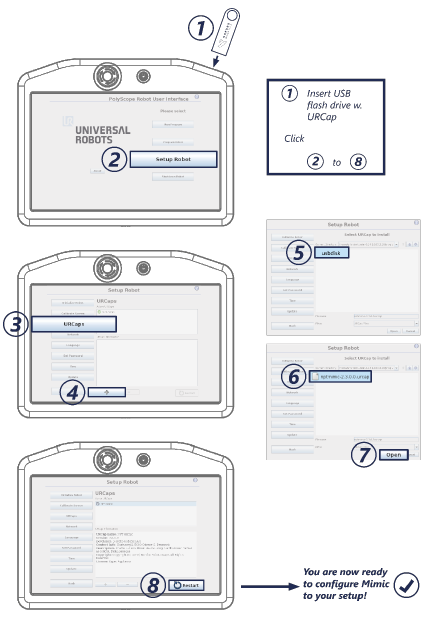
- URCapsが保存されているUSBファイルを挿入し、ロボットの設定から、URCapsをインストールします。
4.2. ロボットの IP を設定する
Settings System Network(図2参照)へ進みます。そして、以下の設定を行います。
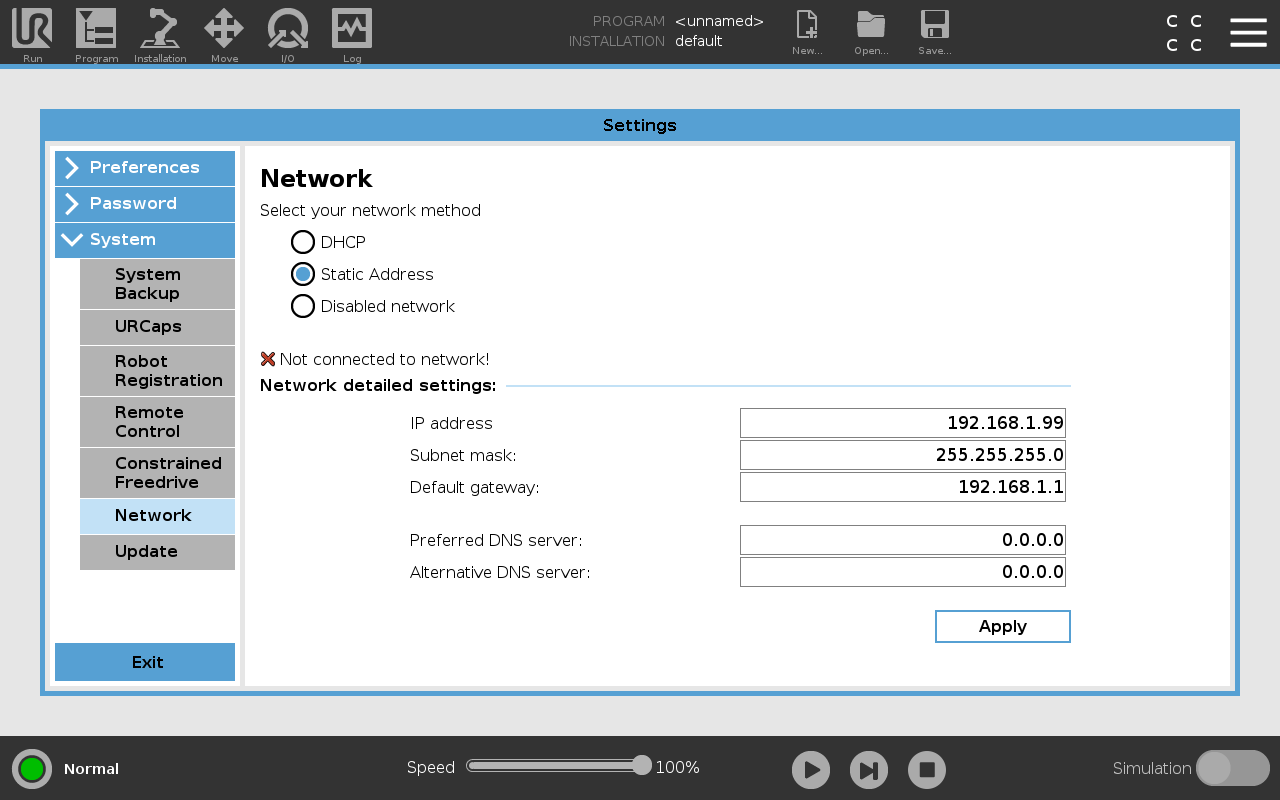
- ミミックをセットし、立ち上げた段階で、IPアドレス、サブネット、デフォルトゲートウェイの3か所の値を確認してください。
- 固定アドレス(Static Address)を使います。
- IP アドレス :192.168.1.99(99は必須ではありませんが、コントローラのIPアドレスと異なる番号を使ってください)
- サブネットマスク 255.255.255.0
- デフォルトゲートウェイ:192.168.1.1
- Apply(適用)をクリックします。
- Not connected to network!" というテキストが "Network connected!" に変わるはずです。
そうでない場合は、ロボットがTracking Kitまたはネットワークに接続されていることを確認してください。
5. UR Capsの接続設定
URCapsの最新版は、こちら。
5.1
Mimic URCapを変更するためのすべての設定とオプションは、メニューの[URCaps]と[Nordbo Mimic]を選択すると、[Installation]の下に表示されます。設定は5つのタブに分類されています。
- General(一般)
- SetUp(設定)
- Trajectories(トラジェクトリー)
- Outputs(出力)
- Lisence(ライセンス)
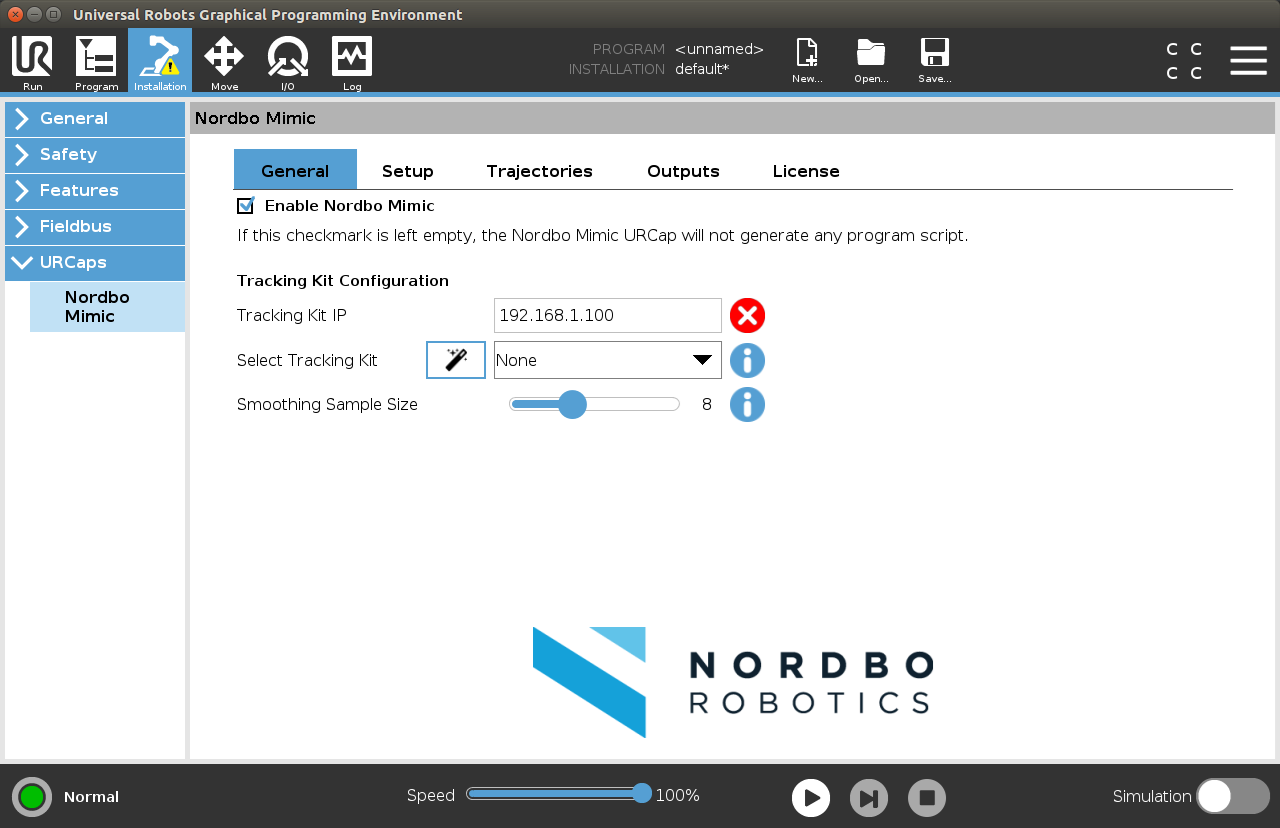
5.2. 一般的な設定の構成
Generalタブは、一般的な設定を行うために使用されます。この画面では、Mimic Tracking Kitとの接続を設定することができます。
ステップ1
[Installation]タブを開き、[Nordbo Mimic]を選択して[General]タブに移動します。
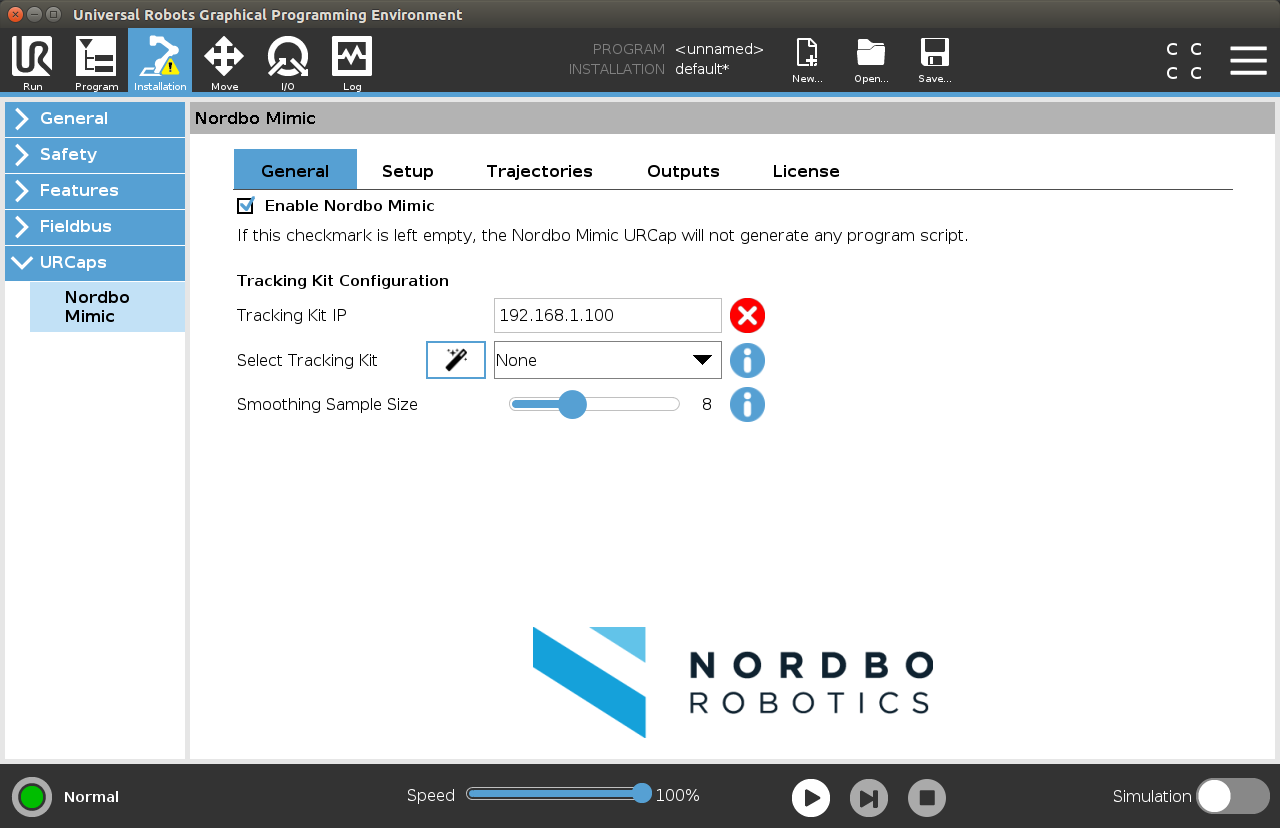
ステップ2
Enable Nordbo Mimic "にチェックを入れて、使用できるようにします。
ステップ3
Tracking KitのIPアドレスを入力します。カスタムIPアドレスが定義されていない限り、デフォルトの静的IPアドレスは192.168.1.100です。
カスタムIPの設定方法については、Tracking Kitのマニュアルを参照してください。
ステップ4
ボタンをクリックすると、ロボットに接続されているTracking Kitの種類を自動判定します。
自動チェックに失敗した場合は、ドロップダウンボックスからお使いのTracking Kitを選択してください。
ステップ 5 (オプション)
場合によっては、記録された動きのスムージングを上げると効果的なことがあります。
最新の記録位置の平均を1つの位置として使用することにより、ユーザーは推定位置のノイズをフィルタリングすることができます。
スライダーを右に動かすと、この平均値に高い数値が使用され、ノイズが軽減されます。
ただし、ジョイスティックとロボットの動作の遅延が大きくなることに注意してください。

ステップ6(EMキットのオプションステップ)
使用するトランスミッターの半球を選択します。ここで選択したオプションは、Webインターフェースで選択されたものより常に優先されます。
ステップ7 (IRキットのみ)
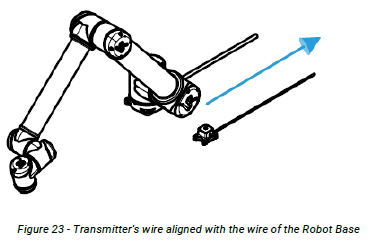
ロボットベースに対するTrackerの向きをキャリブレーションします。これを較正することで、Track and Tune使用時にロボットを制御しやすくなります。
これをキャリブレーションするには、TrackerのY軸がロボットベースのワイヤーと同じ方向を向いている必要があります(図5参照)。

次に、"Align VIVE Tracker "をクリックします。
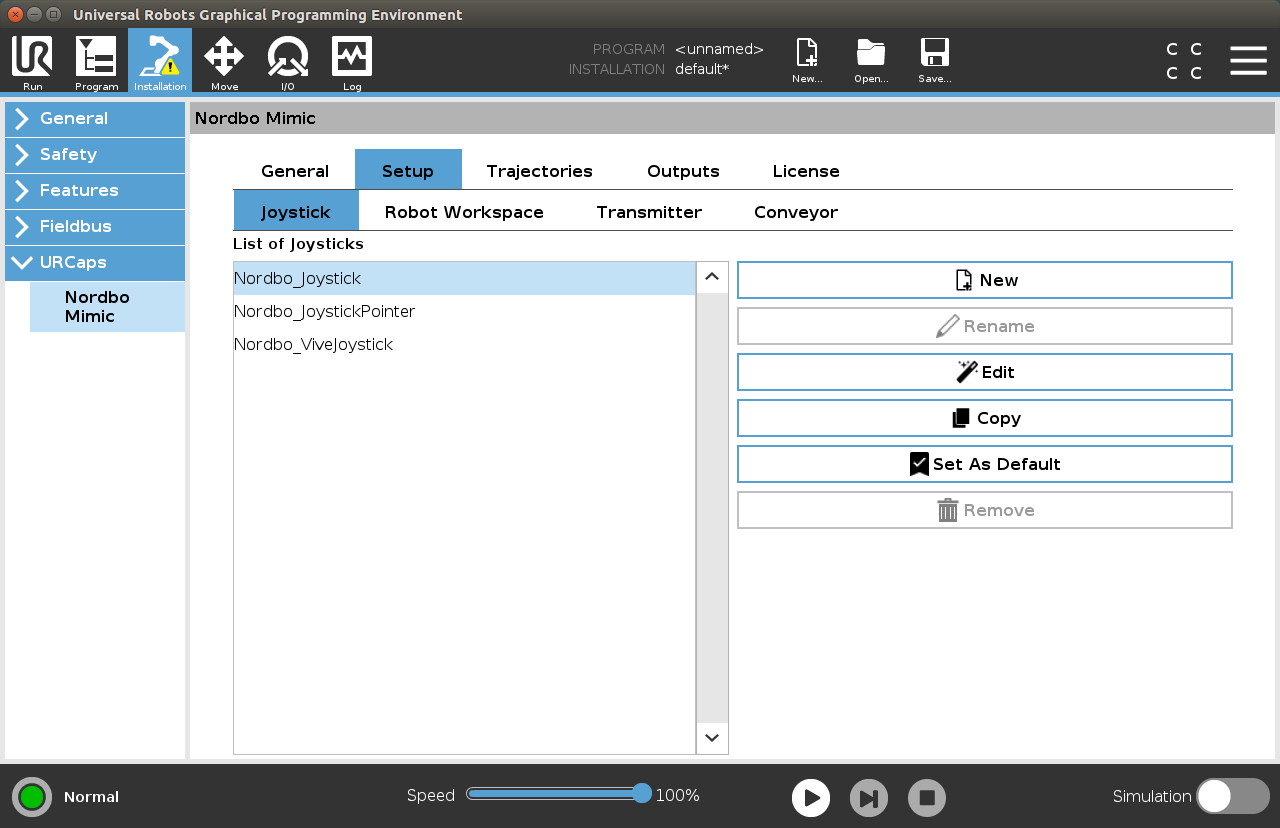
5.3. セットアップ(Setup)の設定
Setup タブには、4つのタブがあります。
- Joystick(ジョイスティック)
- Robot Workspace(ロボットのワークスペース)
- Transmitter (EM Kit のみ関連)
- Conveyer(コンベア)
各タブには、そのタブに関連するオブジェクトのリストが含まれています。ここでは、以下のことが可能です。
- 新規オブジェクトの作成
- オブジェクトの名前の変更
- オブジェクトの編集
- オブジェクトのコピー
- オブジェクトをデフォルトに設定する
- オブジェクトを削除する 新規にオブジェクトを作成したり、編集したりすると、新しいウィンドウが開き、そこでオブジェクトを設定することができます。
5.4. ジョイスティックの設定
Joystick タブは、ジョイスティックに関する設定が可能です。
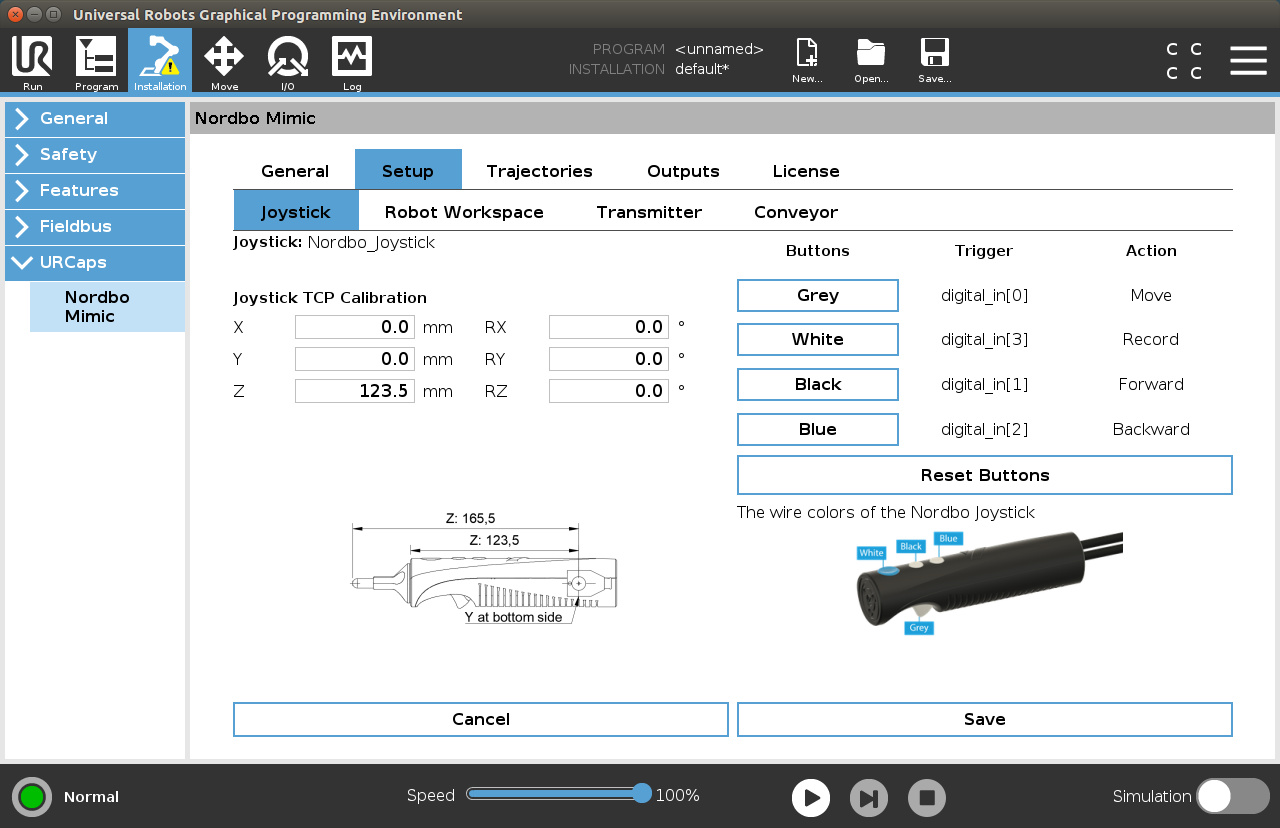
ステップ.1
Joystickのキャリブレーションを入力します。これは、使用するTracking Kitの座標系の原点から、JoystickのTCPまでの移動と回転です。
原点の位置の詳細については、各Tracker Kitのマニュアルを参照してください。
ステップ.2
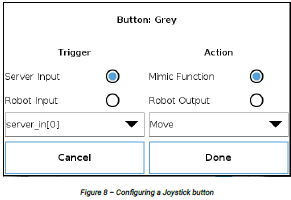
ボタンのマッピングを行います。これは、各ボタンのトリガーをActionに設定することで行われます。
TriggerはTracking Kitからのもの(Server Input)、ロボットからのもの(Robot Input)のどちらかを選択します。
Server Inputを使用できるのはIRトラッカーキットのみですのでご注意ください。
ActionはMimicのアクション(Mimic Function)か、ロボットの出力(Robot Output)を起動させることができます。
5.5. ロボットワークスペースの設定
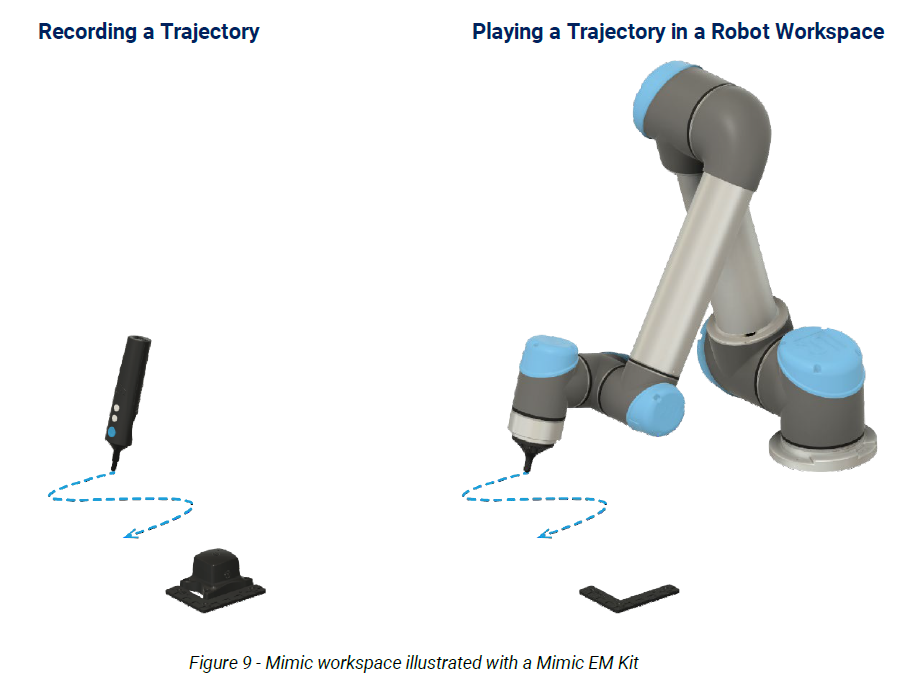
Robot Workspace タブでは、Mimic Teach ノードで記録した Trajectory を実行する場所を指定します。
Teach ノードを使用した場合、Trajectory は Calibration Plate を基準として記録されます。
Play または Tune ノードで軌道を実行する場合は、Calibration Plate を基準として実行されます。
Robot Workspace は、Trajectory を実行したときの、ロボットベースに対する Calibration Plate の位置です。
ロボットのワークスペース ロボットベースに対するキャリブレーションプレートの位置。
5.6. Robot Workspace (ロボットワークスペース)の追加
ステップ1
付属のキャリブレーションツールをロボットのフランジに取り付けます。
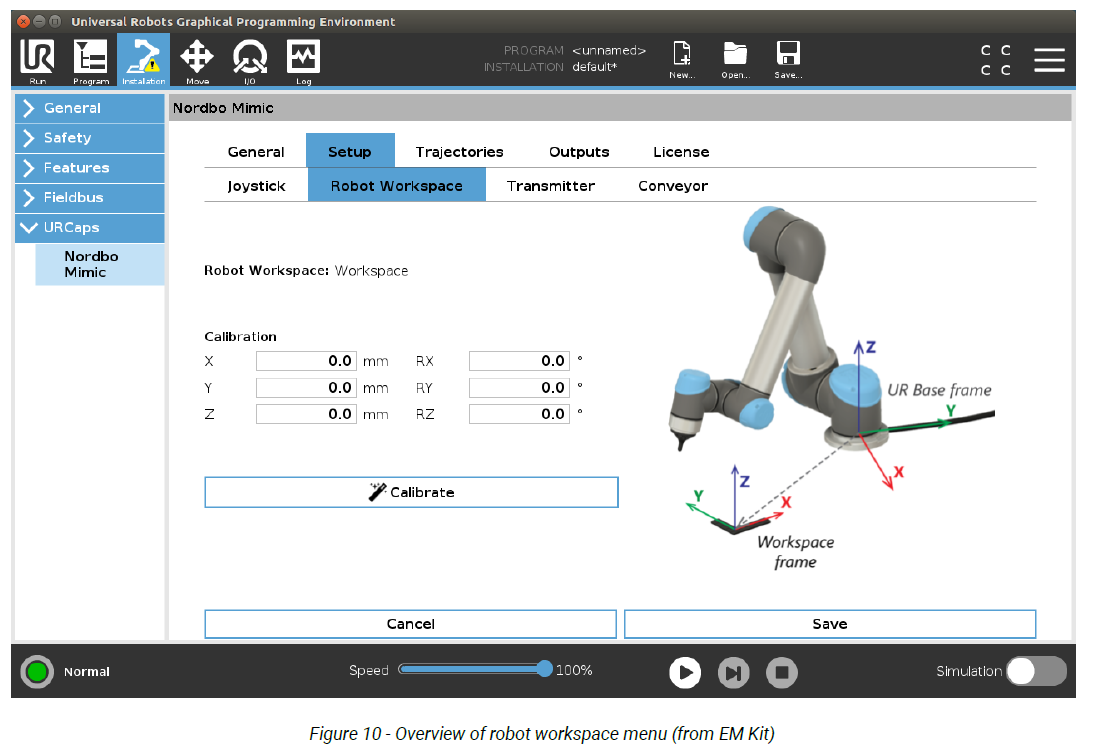
ステップ2.ワークスペースのキャリブレーション
ロボットのワークスペースは、X、Y、Zの距離と、RX、RY、RZ(RPY)の回転の値を挿入することで指定します。
これらの値は、UR BaseフレームとCalibration Plate(校正用プレート)の位置差になります。
”Calibrate" ボタンをクリックすると、自動的に値が挿入されます。
以下の手順で、キャリブレーションの手順を説明します。
最大限の精度を得るために、キャリブレーション・ルーチンを使用することを強く推奨します。
ステップ3.目的のロボットTCPを選択する
Robot TCP "のドロップダウンメニューから、キャリブレーションツールを選択します。
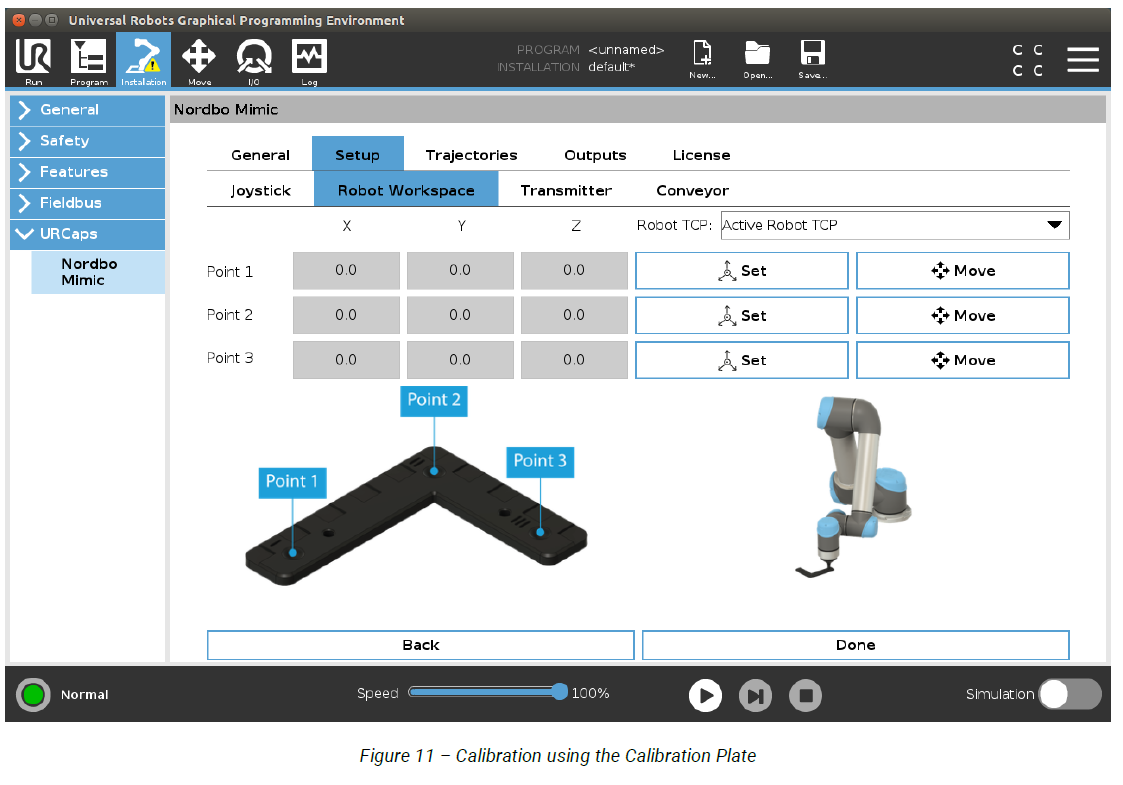
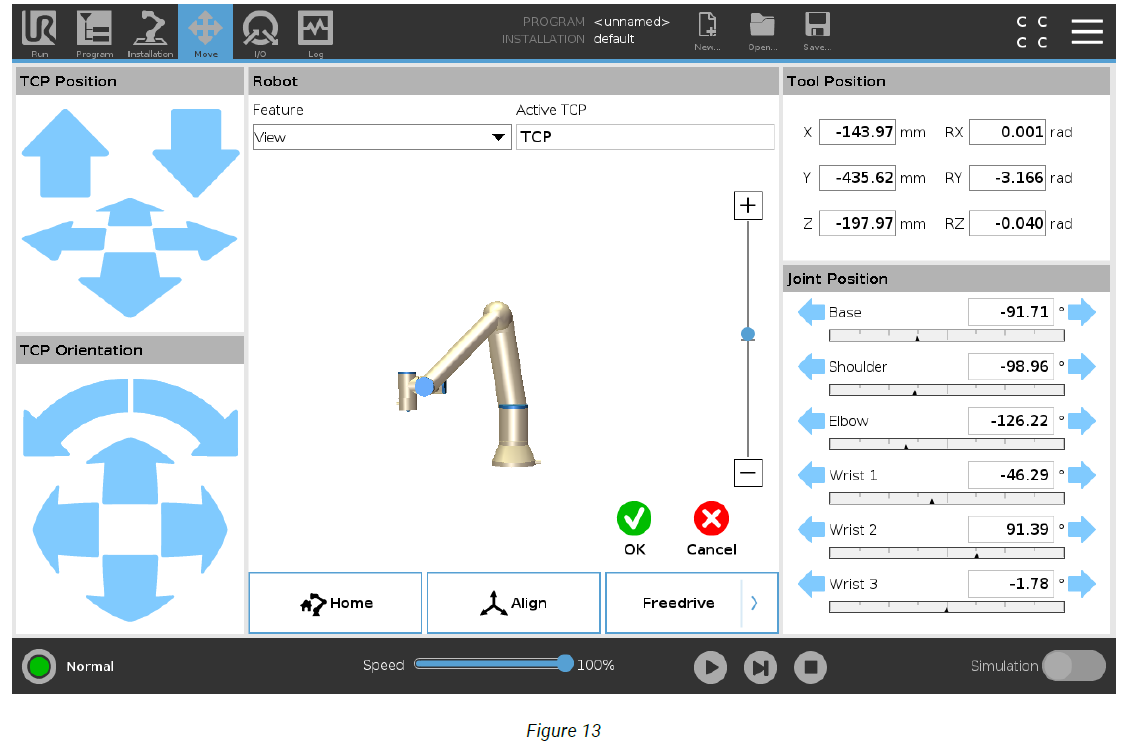
ステップ4.1点のキャリブレーションを行う
Point 1の「Set」ボタンをクリックして、「Move」ウィンドウに移動します。
また、校正されたポイントは、校正板に記された番号と同じであることが重要です(1が1、2が2、3が3)。
可能であれば、校正板をネジで固定することをお勧めします。
ステップ5. ロボットを移動させる
取り付けた校正用ポインタが校正板の正しい点の先端に触れるまでロボットを動かします。
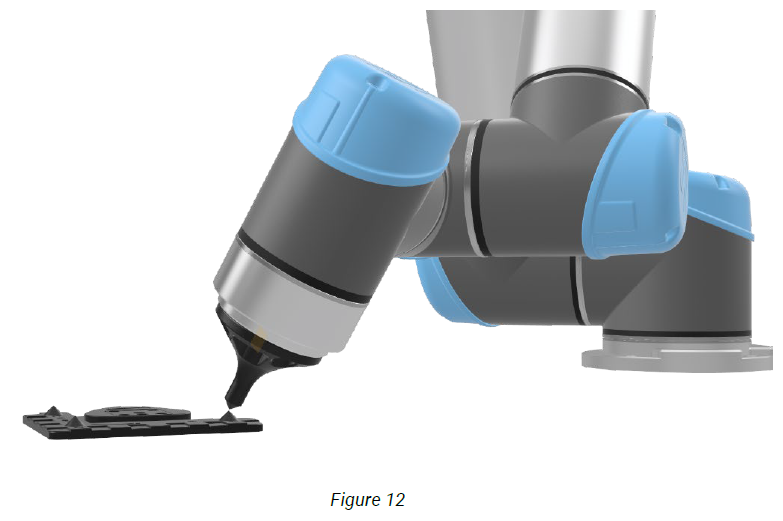
画面中央下の緑色のチェックマークをクリックして、位置を確定します。
これでポイントのX、Y、Zの各フィールドに位置情報が挿入されました。
ステップ6
残りのポイントについて手順 4 と 5 を繰り返し、"Done"、"Save" の順にクリックします。
「キャンセル」をクリックすると、キャリブレーションは保存されません。
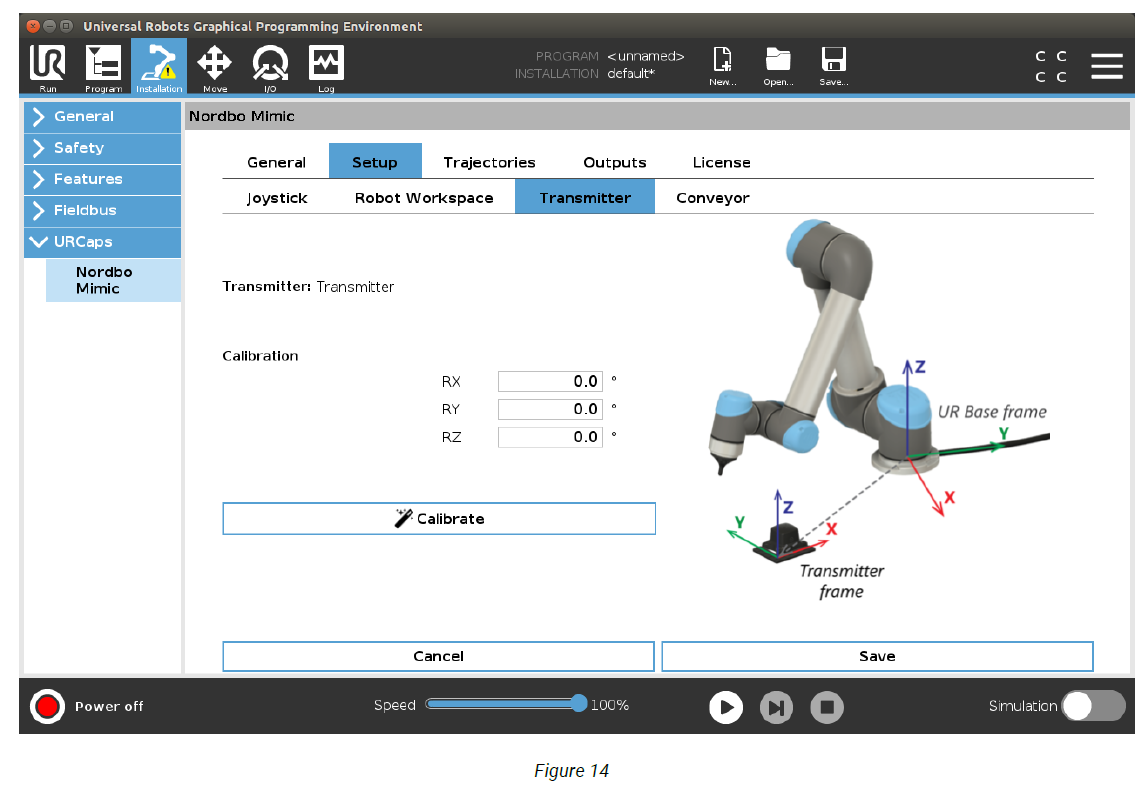
5.7. トランスミッターの設定(EMキットのみ該当)
トランスミッターの向きは、ロボットベースに対して較正することができます。正しいキャリブレーションを行うことで、Track および Tune ノードをより使いやすくすることができます。
新しい Transmitter を追加する手順は、Robot Workspaces のキャリブレーション手順と同じです。キャリブレーションプレートをトランスミッタに当て、5.5 Setup Robot Workspace に記載されているのと同じ手順を行います。トランスミッタはキャリブレーション中に取り外すことができます。
ここで追加した Transmitter は Track や Tune ノードを起動する際に全て選択することができます。
RX、RY、RZ(RPY、Roll Pitch Yaw)のキャリブレーションが0.00°の場合、Transmitterのワイヤがロボットベース上のワイヤと同じ方向を向いています(図14参照)。
このオプションは Track and Tune ノードで常に利用可能で、"Robot Base "と呼ばれます。
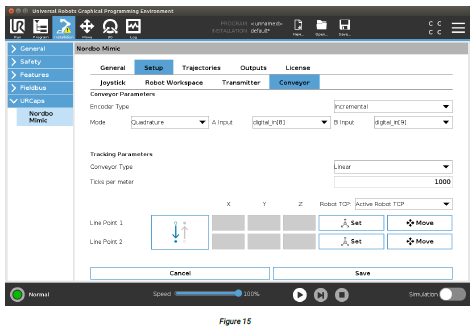
5.8. コンベアの設定(オプション)
Track または Play ノードを使用しているときにコンベアトラッキングを使用するには、まずコンベアを設定する必要があります。
これは、Conveyor タブで行うことができます。
Conveyor タブは、UR のコンベア設定("Installation", "General", "Conveyor Tracking" にあります)と同じような設定になっています。
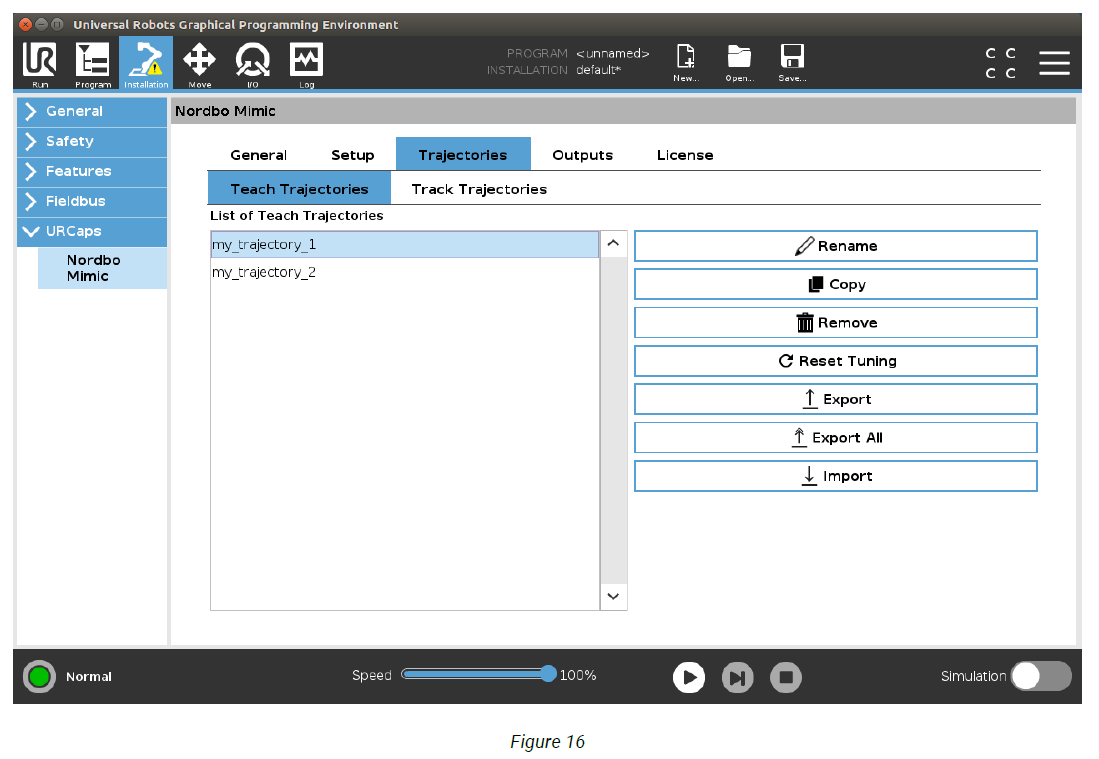
5.9. 保存した軌跡の管理
トラジェトリーのメニューには、Teach Trajectories と Track Trajectories という 2 つのサブメニューがあります。
2 つのタブは同じですが、1 つのタブには Teach ノードで作成された Trajectories が、もう 1 つのタブには Track ノードで作成された Trajectories が含まれます。
このメニューでできること
- 軌道の名前の変更
- 軌道のコピー
- 軌道の削除(Remove Trajectories)
- 軌道のチューニングをリセットする
- 1つの軌道をUSBに書き出す
- すべてのプロジェクトをUSBに書き出す
- USBから軌道をインポートする
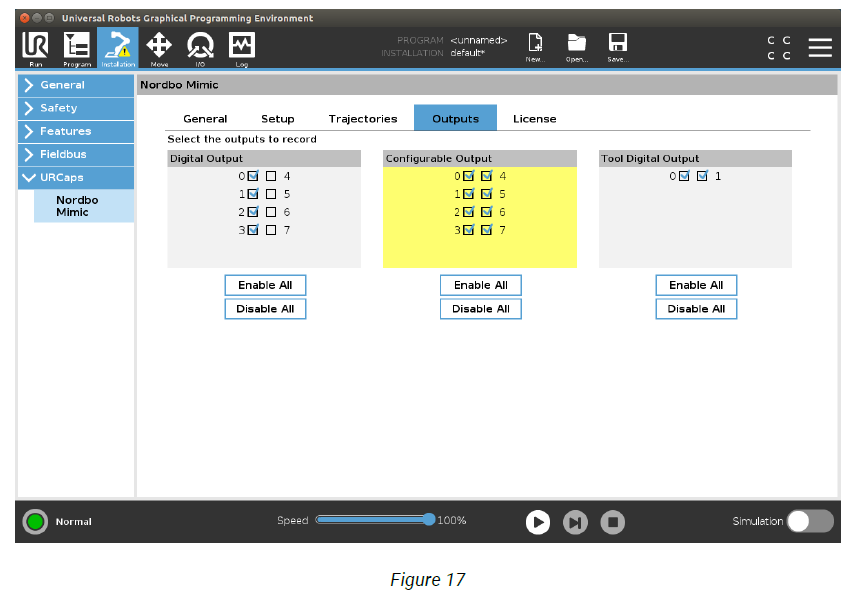
5.10. 出力の設定
Teach または Track を使って軌跡を記録する前に、Outputs タブで記録する出力を設定することができます。
デフォルトでは、すべての出力が選択され、記録されます。
記録しない出力がある場合は、その選択を解除してください。
例として、図17では、デジタル出力4、5、6、7は記録されません。
5.11. ライセンス
Tracking Kitを接続せずにMimicのPlay機能を使用するには、まずライセンスを有効化する必要があります。
ライセンスを有効にするには、以下の手順に従います。
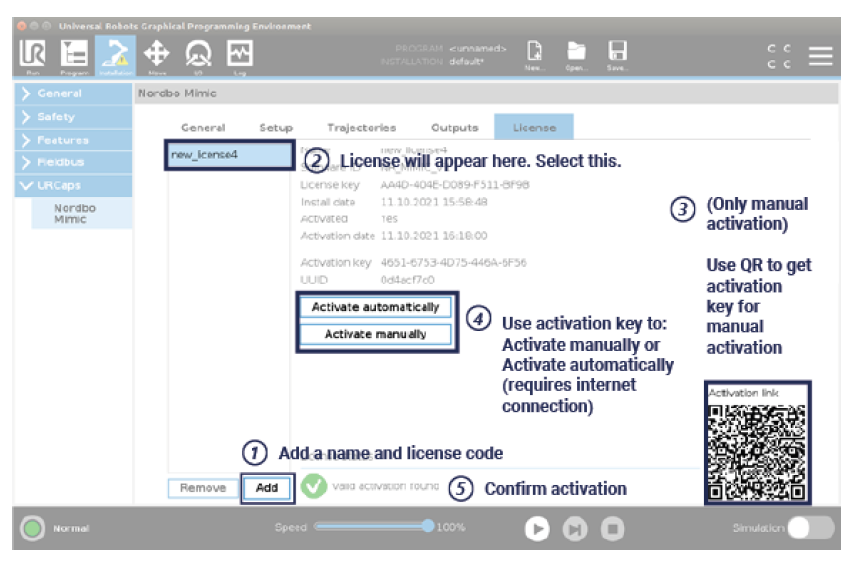
- 名前とライセンスコードを追加します。
- ライセンスは、左図の「new_licence4」の箇所に表示されます。このライセンスを選択してください。
- 手動でアクティベーションを行う場合、QRコードからマニュアルを取得してください。
- アクティベーションには2つ方法があります。
a)手動でアクティベーション
b)インターネット接続を使って、自動でアクティベーション
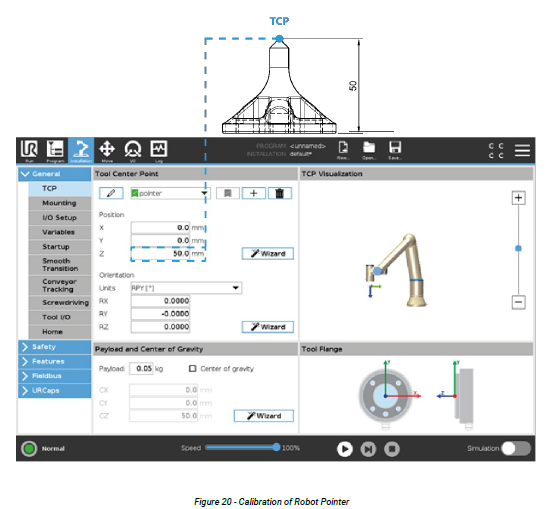
5.12. ミミックポインターのTCPのキャリブレーション
Mimic Kitには、ロボットに取り付けることができるロボットポインタが付属しています。
ロボットポインタのTCPのキャリブレーションを図20に示します。
6. ミミックの使用方法
Track ノード
Trackノードは、ロボットを遠隔操作しながらTrajectoriesを記録するために使用されます。
このノードを使用すると、ロボットはリアルタイムでジョイスティックの動きを模倣し、記録されている正確な動きを簡単に確認することができます。
Teach ノード

Teachノードは、キャリブレーションプレートに対する軌跡を記録するために使用されます。ジョイスティックのTCPの位置が記録されるので、複雑な軌道をたどる軌跡を簡単に記録することができます。
Trajectory ノード

Teach および Track ノードで記録された Trajectory は、Tune ノードで調整することができます。これは、記録されたTrajectoryの精度を調整したい場合に必要です。
Play ノード
Play ノードは、Teach および Track ノードで記録された Trajectories を実行するノードです。
6.0. 出力の取り込み方法
Teach と Track ノードで録音している間、インストールでオフにしない限り、すべての出力が保存されます。
出力は、Tune および Play ノードで Trajectory を実行する際に再び再生されます。
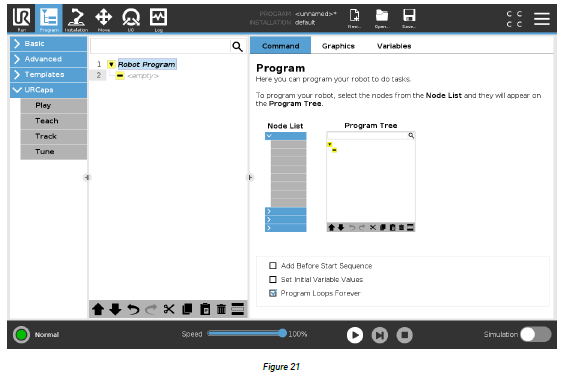
6.1. ロボットプログラムノード - ミミックノードの概要
次のセクションでは、Mimicキットを使用してプログラムを作成する手順について説明します。
Mimicの4つのノードは、左のメニューのURCapsで見ることができます。
次ページの表は、各ノードの概要とできることです。
6.2. Track(トラック)ノードの使用
Track ノードは、ユーザーがジョイスティックを使ってロボットを遠隔操作することを可能にします。
このノードは、Trajectoriesを記録しながら、ロボットの実際の動きの視覚的なフィードバックが必要な場合に使用されます。
また、単純にリアルタイムでロボットを遠隔操作する場合にも使用されます。
Trackノードは2つのビューに分かれています。
- Setup View(ここでは、特定のトラックに対するセットアップを設定します。)
- Runtime View(ここでは、特定のトラックが記録されます。)
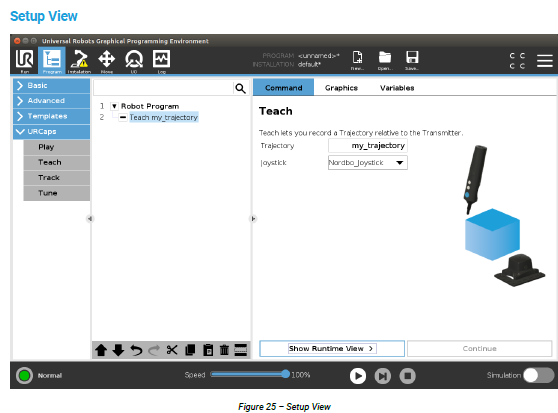
Setup View:
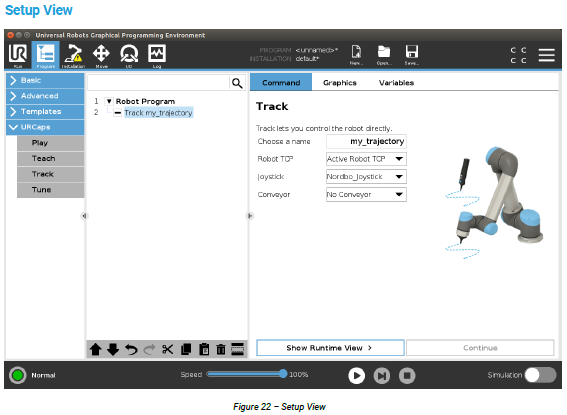
ステップ1
Choose a name "欄に "Trajectory "の名前を記入します。
ステップ2
使用するロボットTCPを選択します。
これは、ディスペンサー、サンダー、グラインダーなど、特定のツールを使用する場合に必要となります。
Active Robot TCP "オプションを選択すると、アクティブなTCPが使用されます。
ステップ3 使用するジョイスティックを選択します。
ステップ4(EMキットの場合のみ) 使用するトランスミッターを選択します。
Robot Baseはトランスミッターのキャリブレーションが行われていない場合でも常に選択可能です。
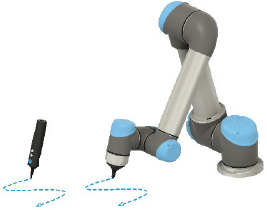
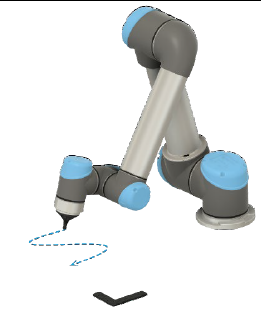
Robot Baseオプションは、トランスミッターのワイヤーをロボットベースのワイヤーと一致させることを意味します(図23参照)。
ステップ 5
使用するコンベヤがあれば、それを選択します。
No Conveyor "を選択すると、コンベアトラッキングは使用されません。
ステップ 6
Show Runtime View "ボタンをクリックします。
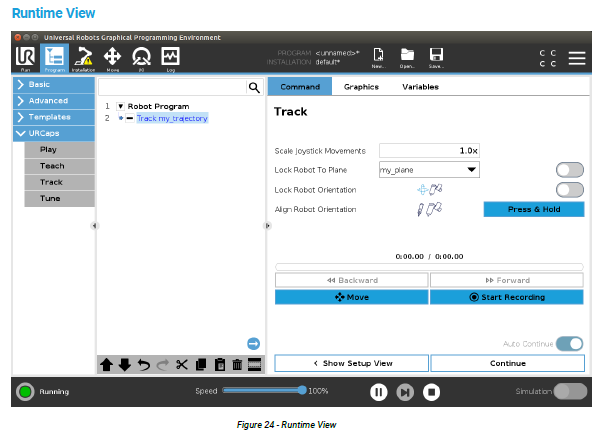
ステップ1
右下のスイッチをクリックして、「自動継続」のオン・オフを切り替えます。
オンにすると、録画が停止された後、ロボットプログラムが自動的に継続されます。
オフにした場合は、ロボットプログラムを続ける前に「continue」ボタンを押す必要があります。
ステップ2(オプション)
Scale Joystick Movements "フィールドでスケールを指定することにより、ジョイスティックの動きをスケーリングすることができます。
数値が大きいほど、ジョイスティックの動きに対してロボットが速く動くことを意味します。
例:Scaleを2.0xに設定すると、ジョイスティックが10cm動くと、ロボットは20cm動くことになります。
警告!
スケールを1.0倍以上にすると、ロボットの動きがユーザーの動きより速くなり、制御が難しくなることに注意してください!(1.0倍以上では、ロボットの動きがユーザーの動きより速くなります。
ステップ3
画面下部の再生ボタンをクリックし、プログラムを開始します。
ステップ4(オプション)
ジョイスティックを好きな向きにしておきます。
Align "ボタンを長押しして、ジョイスティックとロボットの位置を合わせます。
ボタンを離すと位置合わせは終了します。
ジョイスティックとロボットの向きを合わせることで、ロボットがより操作しやすくなります。
ステップ5
ジョイスティックの "Move "入力に割り当てられたボタンを押し続けます(5.4 Setup Joystick参照)。
ロボットがジョイスティックの動きに追従します。また、Teach Pendantの "Move "ボタンも使用できます。
ステップ6(オプション)
Installation Features "にある標準的なURの機能を使ってプレーンを作成します。
“Lock Robot To Plane "コンボボックスでこのプレーンを選択し、スイッチをクリックします。
これで、スイッチを再度クリックするまで、ロボットはこの平面にロックされます。
例:テーブル上に平面を作成し、ロボットがテーブルから10cmの高さにいるときにLock Plane機能を有効にすると、再びこの機能を無効にするまでロボットはテーブルから正確に10cmの高さに留まります。
ステップ7(オプション)
Lock Robot Orientation "の行のスイッチをクリックすると、ロボットの向きをロックすることができます。
ロック中は、ジョイスティックの向きに関係なく、ロボットの向きが一定になります。
もう一度スイッチをクリックすると、この機能は解除されます。
ステップ8
”Record "ボタンをクリックして、移動中の動作を記録します。
また、ティーチペンダントの「Start Recording(記録開始)」ボタンでも記録できます。
どちらかのボタンをクリックすると、「Start Recording(録画開始)」ボタンの色が赤に変わり、プログラムが録画されていることを示します。
参考
録画中の動きの追跡を停止/継続するために、プログラミング中にいつでも「移動」ボタンを離したりクリックしたりすることができます。Move" ボタンを離すと、再びボタンが押されるまで録画は一時停止します。
ステップ9(オプション)
ジョイスティックやティーチペンダントの「Forword(前進)」「Backward(後退)」ボタンで、録画中の動作をやり直すことができます。
Backward "ボタンをクリックすると、実行した動作の後戻りができます。
OBS!
バックトラックで新しい動きを記録すると、この時点以降に記録された「軌跡」が上書きされますので、ご注意ください。
ステップ 10
ジョイスティックの "Record(録画) "ボタン、または画面下の赤いボタン "Start Recording(録画開始)"をクリックして、録画を停止します。
Start Recording "ボタンが青色に変わり、録画が終了したことを知らせます。
記録を停止すると、自動的に軌跡が保存されます。
OBS!
名前を変更せずに新しい録音を開始すると、前のTrajectoryを削除して新しい録音を開始します。
6.3. Teachノードの使用
Teachノードを使用すると、ロボットのワークスペースの外に置かれた部品のTrajectoryを記録することができます。
トランスミッタに押し当てられたキャリブレーションプレートに対するジョイスティックの動きが記録されます。
これらの動作は、5.6 ロボットワークスペースの追加で作成したロボットワークスペース内でロボットが実行することができます。
- Setup View (ここでは、特定のティーチのセットアップを行います)
- Runtime View(ここで特定のティーチを記録します。)
ステップ1
Choose a name "テキストフィールドに "Trajectory "の名前を記入します。
ステップ2
使用するジョイスティックを選択します。
Step 3 (EM Kitとロボットベースが床と平行に設置されていない場合のみ関連)
使用するトランスミッタを選択します。
ロボットベースのオプションは、インストール時にトランスミッターを校正していない場合でも常に利用可能です。
ステップ4
Show Runtime View "ボタンをクリックします。
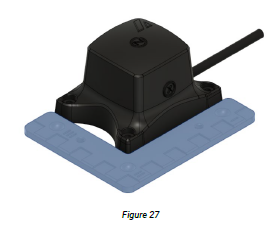
ステップ 1 (EM キット)
図27に示すように、トランスミッタを校正プレートにセットします。
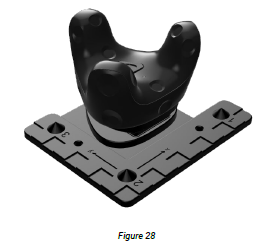
ステップ 1 (IR Tracker Kit)
図 28 に示すように、Tracker を Calibration プレートにセットしてください。
注意:
ロボットが記録された軌跡を実行するとき、部品は校正板に対して全く同じ位置に置かなければなりません。
ステップ2
右下のスイッチをクリックして、「自動継続」のオン・オフを切り替えます。
オンにすると、一度録画が停止されると、ロボットプログラムは自動的に継続されます。
オフにした場合は、ロボットプログラムを継続する前に「continue」ボタンをクリックする必要があります。
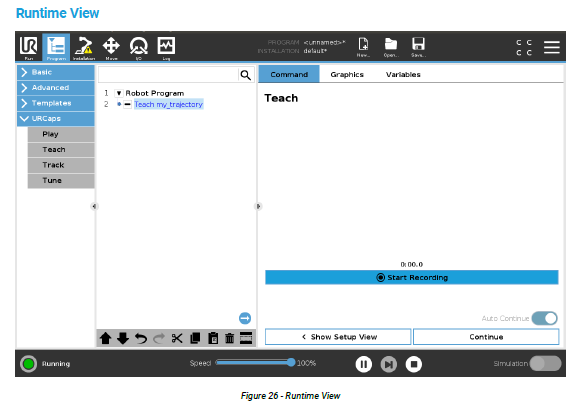
ステップ3
画面下部の「再生」ボタンをクリックすると、プログラムが起動します。
注意:動きを記録するためには、URプログラムが再生されている必要があります。
ステップ4
「Record(録画)」ボタンをクリックし、動作の記録を開始します。
または、ティーチペンダントの「録画開始」ボタンを使用します。
どちらかのボタンをクリックすると、"録画開始 "ボタンの色が赤に変わり、番組が録画されていることを示します。
ステップ5
録画したい動作を行います。
ステップ6
ジョイスティックの「録画」ボタン、または画面下部の赤いボタン「録画開始」をクリックして、録画を停止します。
記録開始」ボタンが青色に変わり、記録されなくなったことを示します。
記録を停止すると、軌跡は自動的に保存されます。
6.4. Tuneノードの使用
「Tune」ノードでは、記録された「軌道」を調整することができます。
これは、記録された軌道を実行し、ロボットが意図した経路から外れるたびに位置を調整することによって行われます。
また、ロボットの移動速度を一定に設定し、異なる間隔で出力を変更することも可能です。
チューニング中は、微調整したTrajectoryで上書きされますが、いつでもリセットすることが可能です。
- Setup View (ここで特定のチューニングの設定を行います)
- ランタイムビュー(チューニングを記録します。)
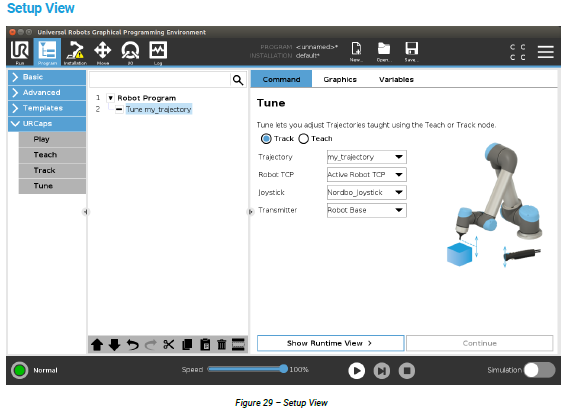
ステップ1
TrackとTeachのどちらで軌跡を記録したかを選択し、チューニングする軌跡を選択します。
ステップ2
Trajectoryを実行する際に使用するロボットTCPを選択します。
これは、ディスペンサーなどの特定のツールを使用する場合に必要です。
Active Robot TCP "を選択すると、アクティブなTCPが使用されます。
ステップ3
使用するジョイスティックを選択します。
ステップ4(EMキットの場合のみ)
使用するトランスミッターを選択します。
Robot Baseはトランスミッターのキャリブレーションが行われていない場合でも常に選択可能です。
Robot Baseオプションは、トランスミッターのワイヤーをロボットベースのワイヤーと一致させることを意味します。
ステップ5(Teachの場合のみ)
TrajectoryがTeachで記録された場合、ロボットがどのワークスペースでTrajectoryを実行するかを選択します。
ステップ6
Show Runtime View "ボタンをクリックします。
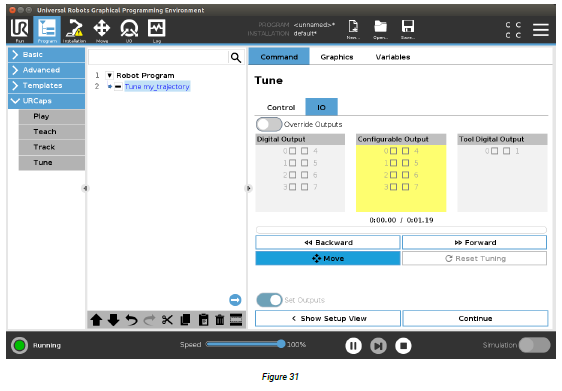
ランタイムビュー:パスの調整
Tuneノードは、記録されたTrajectoryのパスを調整するために使用されます。
これは、Trajectory内の変更すべき位置に移動し、ロボットを希望する位置に移動させることで行われます。
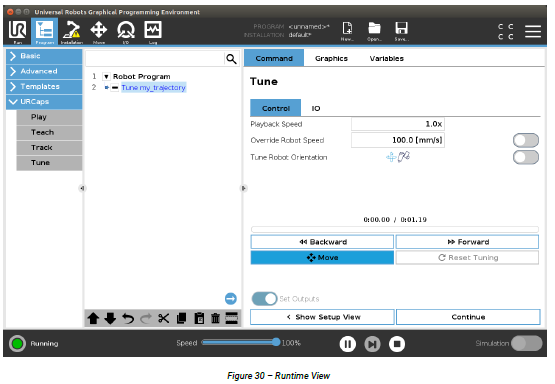
ステップ1
左下のスイッチをクリックして、「Set Outputs」のオン/オフを切り替えます。オフにすると、再生中にMimicが出力を設定することはありません。
ステップ2
画面下部の再生ボタンをクリックして、プログラムを開始します。
ステップ3
ティーチペンダントの「前進」「後退」ボタン、またはジョイスティックを使って、ロボットを「軌道」に沿って前後に動かします(「5.4 ジョイスティックの設定」参照)。
ステップ4
調整したいポイントに到達したら、「移動」ボタンをクリックしたままジョイスティックを動かし、ロボットを好きな方向に移動させます。ロボットが意図した方向に戻ったら、「移動」ボタンを離します。
注意
一度 "Move "ボタンを離すと、補正は軌跡に保存され、元に戻すことはできません。同じポイントを複数回チューニングすることも可能ですが、その場合は1回の補正で済みます。
デフォルトでは、移動中はロボットの向きがロックされます。ロックを解除するには、"Tune Orientation "の行にある "Activate "ボタンをクリックします。
ステップ 5
プログラムのチューニングが終わるまで、ステップ 2 と 3 を繰り返します。
ランタイムビュー 速度のオーバーライド
「Tune」ノードを使うと、「Trajectory」の異なる区間で一定の速度を設定することができます。
これは、「Override Robot Speed」をアクティブにして、Trajectoryの2点間を移動することで行われます。
この2点間の速度は、選択した値に設定されます。この速度は、Playノードで軌跡を実行するときのみ適用されます。
ステップ1
ティーチペンダントやジョイスティックの「前進」「後退」ボタンを使って、ロボットを軌跡の任意の位置に移動させます。
ステップ2
Override Robot Speed "の行にある "Activate "ボタンをクリックし、速度を入力します。
ステップ3
Forward "および "Backward "ボタンで軌跡上の任意の位置に移動します。
ステップ4
Deactivate "ボタンをクリックし、間隔を保存します。PlayノードでTrajectoryを再生すると、ロボットは2点間で選択した速度で移動します。
注意
インターバルはいくつでも作成することができます。2つのインターバルが重なった場合、重なった区間は最近追加されたインターバルが使用されます。
Override Robot Speed」が有効な状態でスピードを変更すると、現在のインターバルを古いスピードで保存し、新しいスピードで新しいインターバルを開始することに相当します。
ランタイムビュー 出力のオーバーライド
Tuneノードを使用すると、Trajectoryのアクティブな出力をオーバーライドすることができます。
これは、"Override Outputs" をアクティブにして、アクティブにする出力を選択し、Trajectory の 2 点間を移動することで行います。
アクティブな出力は、2点間のインターバルで選択された出力に設定されます。
ステップ1
ティーチペンダントまたはジョイスティックの "前進"、"後退 "ボタンを使って、ロボットを軌跡上の任意の位置に移動させます。
ステップ2
Override Outputs "スイッチをクリックし、どの出力をアクティブにするかを選択します。
ステップ3
Forward "ボタンと "Backward "ボタンを使って、軌跡の新しいポイントに移動します。
ステップ 4
Override Outputs "スイッチをもう一度クリックします。これで、2点間の出力が変更されました。
注意
インターバルはいくつでも作成することができます。2つのインターバルが互いにオーバーラップする場合、最新の追加されたインターバルがオーバーラップするセクションで使用されます。
Override Outputs "が有効なときに出力を変更すると、古い出力で現在のインターバルを保存し、新しい出力で新しいインターバルを開始することに相当します。
ランタイムビュー 一般
Tuneノードの実行中は、いつでも停止することができます。
オーバーライド機能が有効な場合は、Trajectory の現在のポイントで無効化され、保存されます。
チューニングをリセットするには、プログラムを停止して、"Reset Tuning "ボタンをクリックします。
これにより、Trajectoryのすべての変更が削除されます。
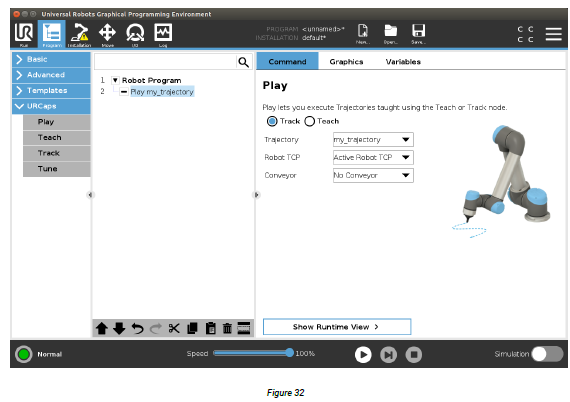
6.5. Playノードの使用
Playノードは、選択されたTrajectoryを実行します。
セットアップビュー
ステップ 1
Trajectory が Track と Teach のどちらで記録されたかを選択します。
ステップ2
Trajectoryを実行する際に使用するロボットTCPを選択します。
注意
ディスペンサーなど、特定のツールを装着している場合に必要です。
ステップ3(Teachの場合のみ)
TeachでTrajectoryを記録する場合、ロボットがどのワークスペースでTrajectoryを実行するかを選択します。
注意
部品がキャリブレーションプレートに対して、Trajectory(軌道)のティーチングのときとまったく同じ位置に置かれていることを確認してください。
ステップ 4
使用するコンベヤがあれば、それを選択します。No Conveyor "を選択すると、コンベアトラッキングは使用されません。
ステップ 5 Show Runtime View "ボタンをクリックします。
ランタイムビュー
ステップ1
左下のスイッチをクリックして、「Set Outputs」のオン/オフを切り替えます。オフにすると、再生中にMimicが出力を設定することはありません。
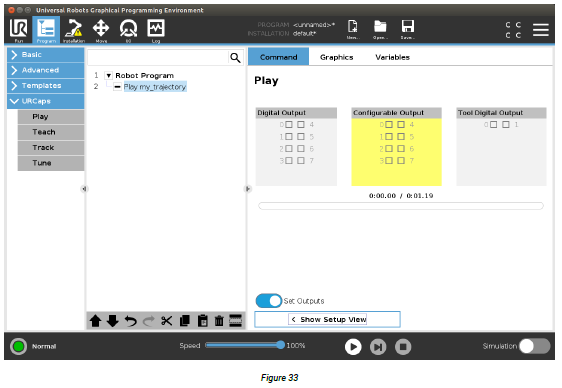
ステップ2
画面下部の再生ボタンをクリックすると、「軌跡」の実行が開始されます。
ステップ3(オプション) 画面中央下のスライダーで、ロボットの移動速度を調整します。
7. トラブルシューティング
Q:トラッキングが不正確になったり、ノイズが入ったりすることがあるのはなぜですか?
A:トラッキングが不正確になったり、ノイズが入ったりする場合、使用しているTracking Kitによって、複数の原因が考えられます。
詳しくは、Tracking Kitのマニュアルをご覧ください。
Q:なぜMimicはTracking Kitに接続できないのでしょうか?
A:MimicがTracking Kitに接続できない場合、以下を確認または実行してください。
- すべてのケーブルが正しく接続されているか確認してください。
- ロボットのIPが正しく設定されているか確認する。
- トラッキングキットのIPが正しく設定されているか。詳細はTracking Kitのマニュアルを確認してください。
- Tracking Kitに接続されているロボットやコンピューターが1台だけであることを確認してください。
- Tracking Kitを再起動してください。
- URロボットを再起動してください。