📘
Mimic-IRキット 産業用ロボット用
Contents1.1. Intended Use ............................................................................................................................................1.2. Prerequisites ............................................................................................................................................ 41.3. Safety Warnings ....................................................................................................................................... 42. Getting to Know the Mimic Kit .............................................................................................................. 53. Mimic Kit Information .......................................................................................................................... 74. How to Connect to Robots ................................................................................................................... 94.1. ミミックキットをロボットに接続する Connecting the Mimic Kit to the robot4.2 How to Connect Joystick and Controller .............................................................................................. 114.3 Default Button Configuration ................................................................................................................ 124.4 How to Configure a Nachi Robot .......................................................................................................... 135. An Overview of the Web Interface ...................................................................................................... 195.1 Web Interface as a User Interface ........................................................................................................ 205.2 Real-Time View ...................................................................................................................................... 205.3 Record .................................................................................................................................................... 215.4 Hemisphere ............................................................................................................................................ 225.5 Network .................................................................................................................................................. 245.6 About ...................................................................................................................................................... 256. How to Access the Web Interface ...................................................................................................... 26How to Configure the Mimic Extension .............................................................................................. 317.1 Overview ................................................................................................................................................. 32
Contents
作業を始める前に
本書は、Nordbo RoboticsのMimic Kitをマニピュレーターに取り付けるためのガイドとなります。本書は、ロボットの動作を開始する前に実施しなければならないリスクアセスメントに関する情報 を提供するものではありません。
1.1. Intended Use ............................................................................................................................................
1.1. 使用目的
本書は、産業用ロボットのマニピュレーターに Nordbo Robotics 社の Mimic を取り付けるためのガイドです。本書は、ロボットの動作開始前に行うリスクアセスメントについては記載していません。
1.2. Prerequisites ............................................................................................................................................ 4
1.2. 前提条件
本書の内容を理解するためには、使用するマニピュレーターのソフトウェアに関する基本的な知識 があることが必要です。また、産業用ロボットを使用する際のリスクを理解していることが必要です。また、パソコンの基本的な操作方法、ネットワークの設定方法についても理解していることをお勧 めします。
1.3. Safety Warnings ....................................................................................................................................... 4
1.3. 安全に関する警告
本製品を使用される方は、以下の説明を必ずお読みください。
警告 このマークは、指示に正しく従わない場合に、危険、有害、または好ましくない状況が発生する可能性があることを示します。この表示を無視して誤った取り扱いをすると、人が死亡または重傷を負う可能性が想定される内容を示しています。
ハードウェアをロボットに接続しようとする前に、ロボットが意図せずにできないことを確認することが重要です。 したがって、ロボットにセンサーを接続しようとする前に、ロボットの電源をオフにする必要があります。
ロボットのコントローラーにワイヤーを接続しようとするときや、Nordbo Roboticsの製品間でケーブルを接続するときは、必ずロボットの電源を切ってから行ってください。
製品は硬い表面に落とすと破損することがあります。ユーザーがケーブルを引っ張ったり、締め過ぎたりすると、コネクターが壊れることがありますので、ご注意ください。
センサーは指定された測定範囲内で使用することができます。指定された範囲外でセンサーを使用すると、予期しない結果を招くことがあります。Nordbo Roboticsは、本製品の使用による損害や負傷について、一切の責任を負いません。
2. Getting to Know the Mimic Kit .............................................................................................................. 5

3. Mimic Kit Information .......................................................................................................................... 7
3.1. Mimic Kit Contents
| Picture | Reference Code | Description |
|---|---|---|
| 1x NPT-CTRL | The Mimic Controller that enables tracking and can be connected to a PC or a robot. | |
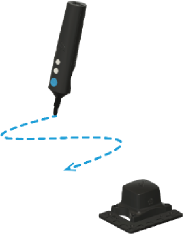
| 1x NPT-JOY-4B (Incl. 1x NPT-R50-R) | An ergonomic joystick with buttons used for easy Trajectory teaching. Pointer included for precision and easy edge tracing. The receiver antenna is inserted in the joystick by default but can be used separately for a custom teaching tool. | |
| 1x NPT-R50-T | The transmitter antenna which emits an electromagnetic field | |
| 1x Power supply | Provides the Mimic Controller with power | |
| 1x Workspace calibration kit | The calibration kit is used to calibrate the workspace when transferring Trajectories to the robot. | |
| 4x M4-10 mm black nylon bolts 4x M6-10 mm stainless steel bolts | The bolts are necessary for mounting the pointer on the Joystick (black nylon bolts) or robot (stainless steel bolts). | |
| 3m 6-pole cable, open-ended | Cable to connect the Mimic Controller to the robot's I/O ports. | |
| 1x USB Flash drive | USB Flash drive containing URCap and documentation |
4. How to Connect to Robots ................................................................................................................... 9
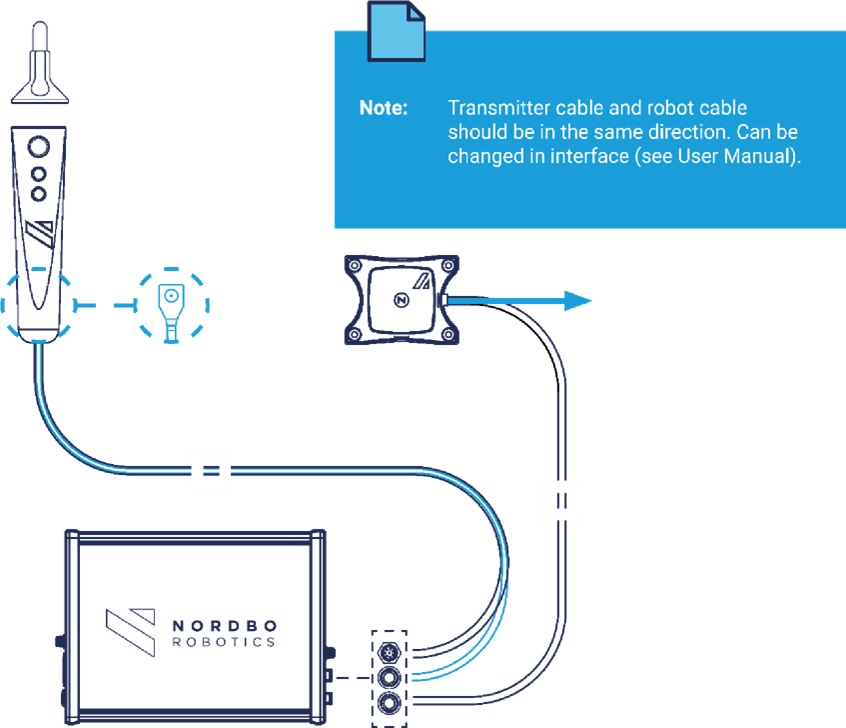
4.1. ミミックキットをロボットに接続する Connecting the Mimic Kit to the robot
次のセクションでは、Nachi または Kuka のロボットにセンサーを取り付ける手順と、そのために作成されたソフトウェアツールの使用方法について説明します。
センサーをロボットに接続するために、ユーザーは電気配線からデジタル入力までの基本的な理解が必要です。

Step1:受信機をジョイスティック内部に挿入します。受信機のアンテナは、Yが下を向くようにします。
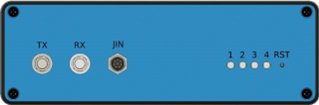
Step2:ジョイスティックの6極ケーブルをJIN入力に、受信機のケーブルをコントローラのRX入力に接続してください。
Step3:送信機のケーブルをTX入力のコントローラに接続します。
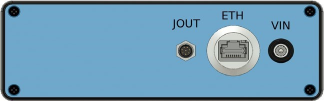
Step4:付属のRJ45イーサネットケーブルを使用し、コントローラをスイッチに接続します。
Step5:電源はコントローラのVIN-inputに接続してください。
Step6:ロボットをスイッチに接続し、両方のイーサネット出力に接続します。1つは外部追跡ネットワークカードから、もう1つはメインネットワークカードからです。
4.2 How to Connect Joystick and Controller .............................................................................................. 11
4.3 Default Button Configuration ................................................................................................................ 12
| ID | 1 | 2 | 3 | 4 | Power |
|---|---|---|---|---|---|
| Wire color | Grey | Blue | Black | White | Brown |
| Default digital input | DI0 | DI1 | DI2 | DI3 | 24V |
下記以外の入力に接続する場合は、MimicエクステンションのI/O設定の更新が必要です。
4.4 How to Configure a Nachi Robot .......................................................................................................... 13
ここでは、ミミックエクステンションで制御するためのナチロボットの設定をステップバイステップで説明します。
ステップ1
ナチロボットの権限をスペシャリストレベルに変更する。ロボットを起動し、ティーチパッドの「R」をクリックし、コード「314」を入力し「Enter」をクリック、コード「12345」を入力し「Enter」をクリックします。
ステップ2
メモリ保護を無効にします。定数設定」→「1 制御定数」→「11 メモリ保護」に移動し、メモリ保護を「無効」に設定します。Complete "をクリックし、変更を保存します。その後、ロボットコントローラを再起動する必要があります。
ステップ3
ナチロボットの権限をエキスパートレベル以上に変更します。Step1参照
ステップ4
Extend Ethernetをセットアップします。
Constant Settings" "8 Communications" "7 Extend Ethernet "に移動してください。
Extend Ethernetを「Enabled」、IPアドレスを「192.168.5.22」、サブネットマスクを「255.255.255.0」に設定します。
Complete "をクリックして変更を保存します。
その後、ロボットコントローラを再起動する必要があります。
ステップ5
Nachiロボットの権限をスペシャリストレベルに変更します。Step1参照
ステップ6
メモリ保護を有効にします。
定数設定」→「1 制御定数」→「11 メモリ保護」を選択し、メモリ保護を「有効」に設定します。
Complete "をクリックして、変更を保存します。その後、ロボットコントローラを再起動する必要があります。
ステップ7
外部追跡を設定します。Constant Settings" -> "45 External Tracking "に移動します。
- IPアドレスを192.168.5.23に設定します。
- ポートを2568に設定します。
- User(Digital)入力に設定します。mimicがどの入力を読み取ることができるかの開始インデックスを設定します。Mimicは64個の入力を読み取るので、このインデックスを21に設定すると21~84個の入力を読み取ることになります。0に設定すると、Mimicはどの入力も読み込まないようになります。
- ユーザー(デジタル)出力です。ユーザー(デジタル)出力:Mimicが設定できる出力の開始インデックスを設定します。Mimicは64個の出力を設定するので、このインデックスが21に設定されると、21〜84個の出力が設定されます。このインデックスを0に設定すると、mimicはどの出力も設定できなくなります。
- タイムアウトは300msです。
- 平行移動0.0mm、0.0mm。
- 回転動作 0.00deg,0.00deg.
- 関節角度を0.00degに設定します。
完了をクリックして保存します。
ステップ 8
メインのイーサネット接続を設定します。
“定数設定" "8 通信" "2 イーサネット" "1 TCP/IP" に移動します。
- DHCP を "無効" に変更
- IP を 192.168.5.21 に変更。
- サブネットマスクを「255.255.255.0」に変更します。
ステップ9
ロボットのプログラムを "Program "フォルダに転送してください。これはUSBにあります。
FTP(オプション)
- FTPを有効にしてください。Constant Settings" -> "8 Communications" -> "2 Ethernet" -> "3 FTP" FTP Serviceを "Enabled "に変更する。
- PCとロボットをイーサネットケーブルで接続する。
- ファイルブラウザを開く
- ftp://192.168.5.21 またはステップ8で選択したIPにアクセスします。
- これでファイルブラウザを使ってロボットにファイルを追加することができるようになるはずです。 転送するファイルは以下の通りです。
| Public.inc | Global variable definitions |
|---|---|
| USERTASK-A.000 | TCP communication with MIMIC box |
| USERTASK-A.001 | UDP communication with MIMIC box |
| GLOBALCONST.INC | Global numeric constants variable definitions |
| INSTRUCTIONSERVER.INC | Numeric constants and variable alias for USERTASK-A.000 |
| LOGSERVER.INC | Numeric constants and variable alias for USERTASK-A.001 |
| GENERALSERVER.INC | Numeric constants for USERTASK-A.000 and USERTASK-A.001 |
| BOXCOMMANDS.INC | Numeric constants for USERTASK-A.000 and MZ07A.000 |
| VARIABLEALIAS.INC | Variable alias names for MZ07-A.000 and MZ07A.001 |
| MZ07-A.000 | Robot Program for execution of MIMIC box commands |
| MZ07-A.001 | Robot Program for execution of MIMIC box trajectories |
| MZ07-A.072 | Mimic main program |
| MZ07-A.071 | Example how to call the subprogram callback |
ステップ10
ロボットコントローラを再起動する
ステップ11
ナチロボットのパーミッションをスペシャリストレベルに変更します。Step1参照
ステップ12
ロボットのプログラムをコンパイルします。
"Service Utilities" -> "9 Program Conversion" -> "8 Language "に移動します。
ステップ13
コンパイルするロボットプログラムを選択します。
- usertask-a.000
- usertask-a.001
- MZ07-A.000
- MZ07-A.001
- MZ07-A.070
- MZ07-A.071
- MZ07-A.072
ステップ14
実行]をクリックし、ポップアップを確認します。
ステップ15
ロボットコントローラを再起動します。
- How to Configure a Kuka Robot ............................................................................................................ 17
Prerequisites ................................................................................................................................................... 17
5. An Overview of the Web Interface ...................................................................................................... 19
5.1 Web Interface as a User Interface ........................................................................................................ 20
Web インターフェースは、コンピュータからアクセスできるユーザーインターフェースです。このオプションを使用すると、ユーザーはセンサーのIPアドレス、半球の使用、ファームウェアのバージョンとシリアル番号の確認、および擬似エクストーションの使用を設定することができます。
ウェブインターフェースは、さらに、RealTime View を使用してセンサーの機能をデモするために使用することができます。
Web インターフェースへのアクセス方法については、セクション 4. 「Web インターフェースへのアクセス方法」を参照してください。
次のセクションでは、ウェブインターフェースの標準的なレイアウトを詳しく説明します。
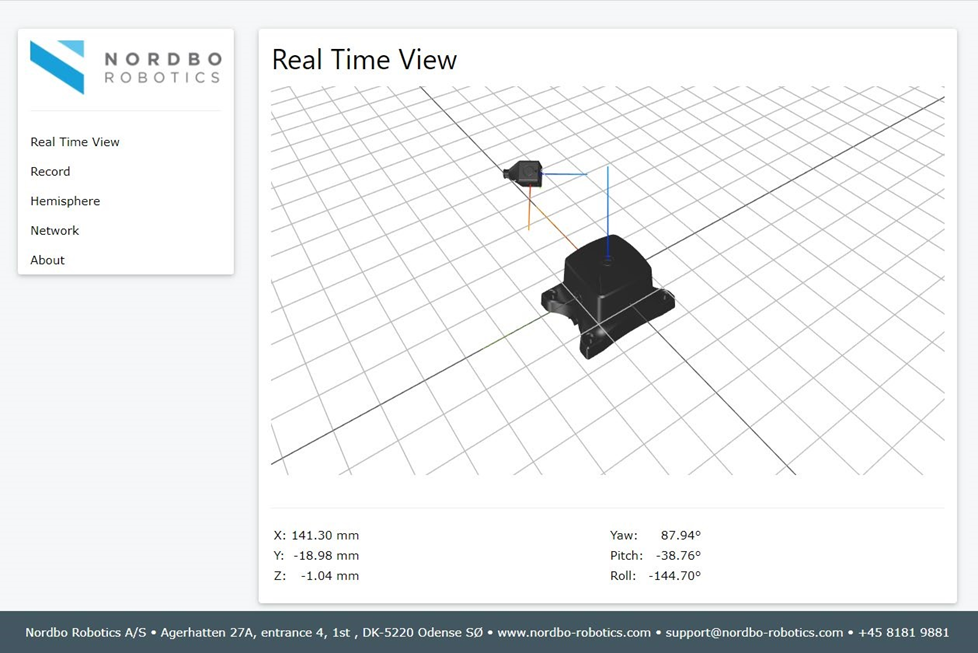
5.2 Real-Time View ...................................................................................................................................... 20
ウェブインターフェースのランディングページには、「リアルタイムビュー」があります。このページでは、システムが正しく機能しているかどうかを判断することができます。送信機と受信機のライブビューは、センサーの動きを表示します。3Dビューの下には、トランスミッターに対するレシーバーの現在位置が表示されます。
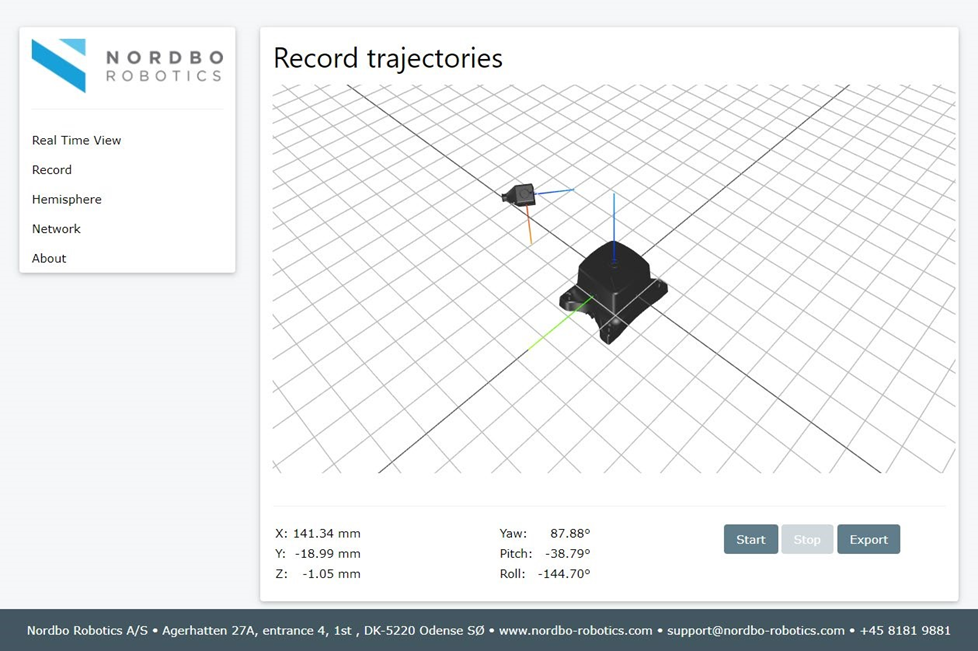
5.3 Record .................................................................................................................................................... 21
記録ページでは、受信者の動きを記録することができます。開始ボタンと停止ボタンを使って、動きを記録し、CSVファイルとして出力することができます。
5.4 Hemisphere ............................................................................................................................................ 22
半球のページでは、送信機が動きを追跡するために使用する領域を変更することができます。Select Hemisphere]をクリックし、希望の設定を選択します。Saveをクリックして、設定を完了します。
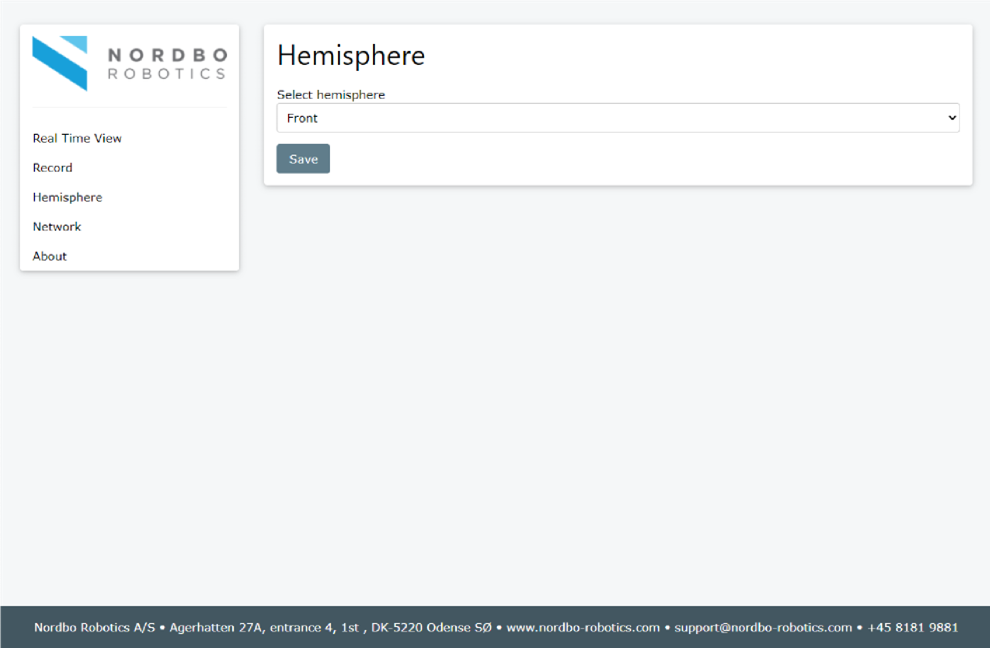
An overview of the 4 different hemisphere options ..................................................................................... 23
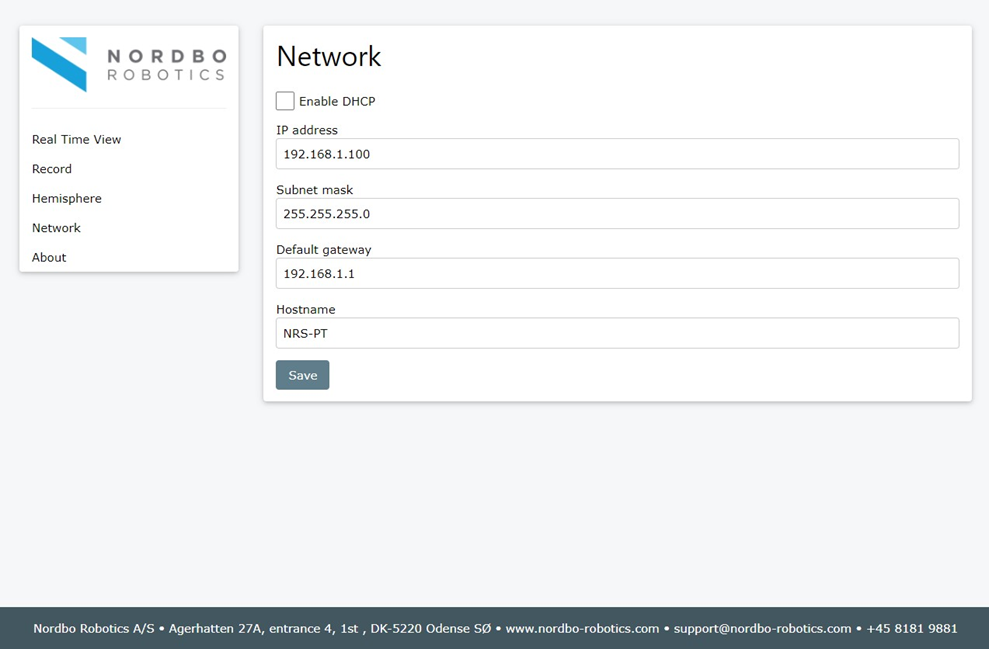
5.5 Network .................................................................................................................................................. 24
Network ページでは、コントローラのネットワーク設定を行うことができます。
デフォルトでは、DHCP は無効になっており、IP アドレスは 192.168.1.100 になっています。
DHCP を有効にすると、ネットワークが IP、サブネットマスク、デフォルトゲートウェイを割り当てるようになります。
デフォルトのホストネームは NRS-PT ですが、インターフェースから変更することができます。
設定が完了したら、Save をクリックし、設定を適用します。
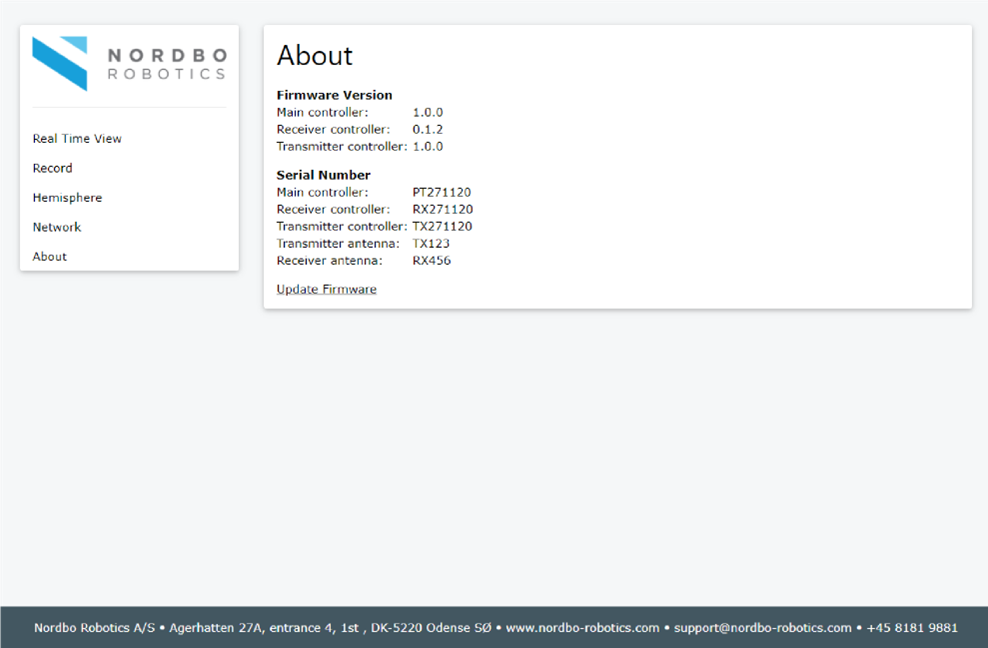
5.6 About ...................................................................................................................................................... 25
ネットワークページでは、特定の製品のファームウェアバージョンとシリアル番号に関する詳細情報を確認することができます。このページから、ユーザーはNordbo Roboticsが提供するファイルをアップロードして、ファームウェアを更新することができます。
6. How to Access the Web Interface ...................................................................................................... 26
6.1 Setting the IP Address of the Controller ............................................................................................... 27
インターネットブラウザでコントローラの IP アドレスを入力してアクセスする前に、 ネットワークの設定を行う必要がある場合があります。 以下では、Windows PCを使用してコントローラに接続する方法について説明します。
ステップ1
コントローラーの電源を接続し、イーサネットケーブルでPCと接続します。
ステップ2
メニューのWi-Fi/LANアイコンを右クリックして "ネットワークとインターネット "の設定を開きます。
図10
ステップ3
アダプターオプションの変更」をクリックします。
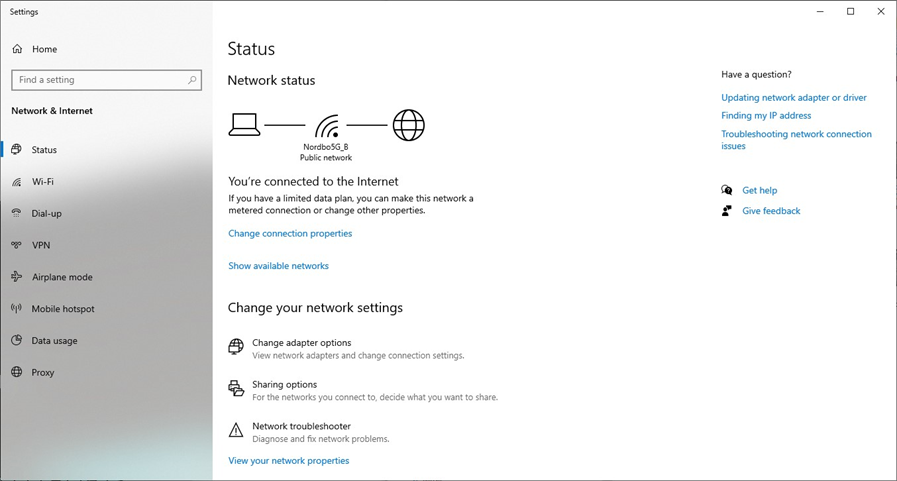
図11
ステップ4
"Ethernet 3 "を右クリックし、"プロパティ "を選択します。
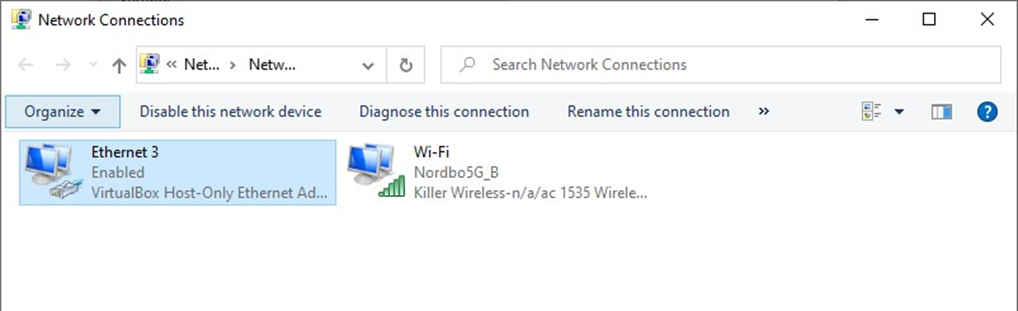
図12
ステップ5
Internet Protocol Version 4 (TCP/IPv4)を選択し、"プロパティ "をクリックします。
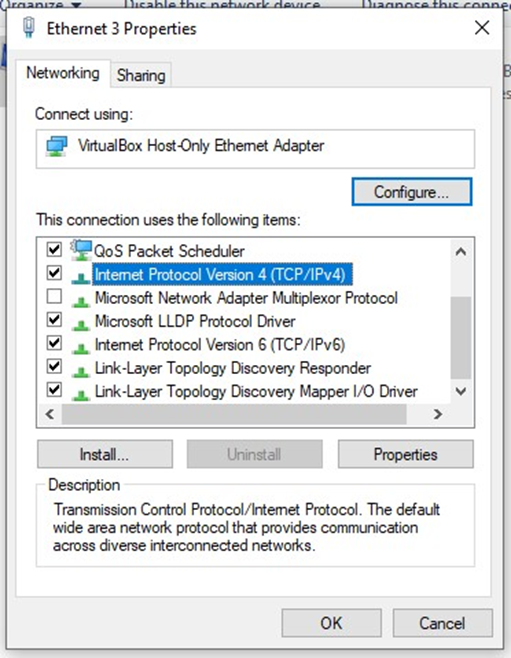
図13
ステップ6
IPアドレスを192.168.1.100に設定します。
サブネットマスクを255.255.255.0に設定します。
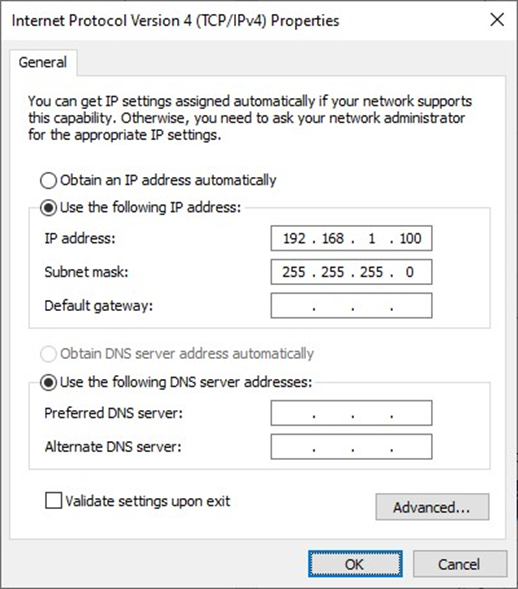
図14
ステップ7
ブラウザでIPアドレス192.168.1.100を入力し、リアルタイムビューにアクセスします。
図15
How to Configure the Mimic Extension .............................................................................................. 31
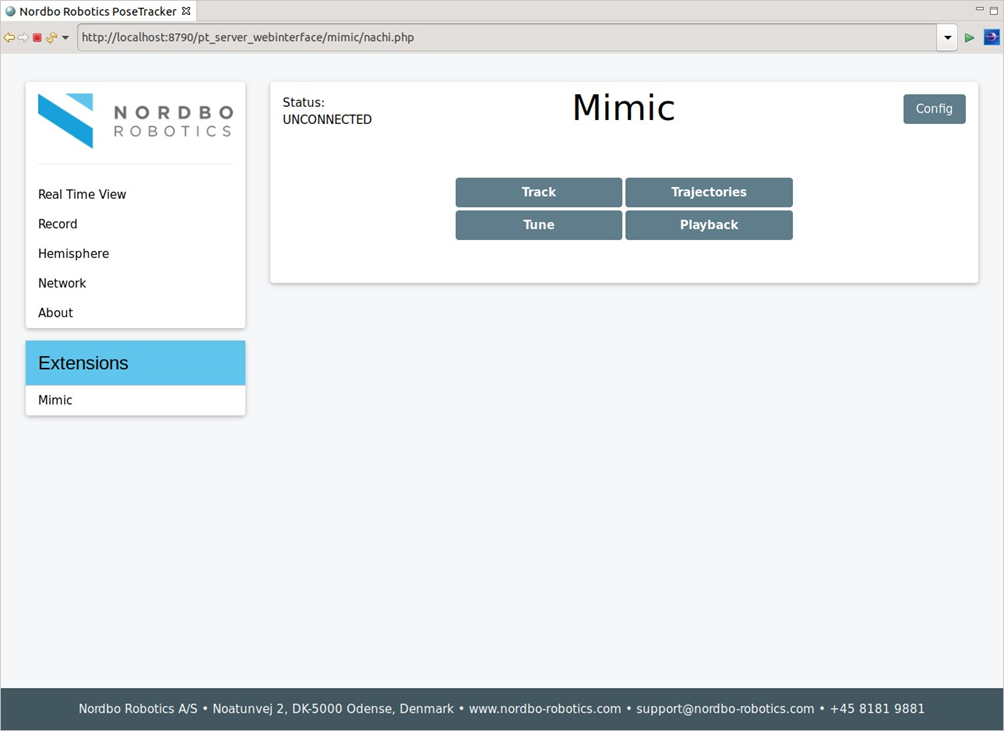
7.1 Overview ................................................................................................................................................. 32
Mimicエクステンションはステータスフィールド、コンフィグページ、機能メニューで構成されています。次のセクションでは、コンフィグページの設定方法について詳しく説明します。
- Configuring the General Settings .......................................................................................................... 34
- Setting up the Mapping of I/Os ............................................................................................................. 35
- Setting up the Recording of Outputs .................................................................................................... 37
- Setting up the Joystick .......................................................................................................................... 40
- Setup Features (Optional) ..................................................................................................................... 43
- Configure the Robot ............................................................................................................................... 45
- Setting up the Joint and Speed Limits .................................................................................................. 47
- Mimic Status Field ................................................................................................................................. 49
- How to Use the Mimic Kit ................................................................................................................... 50
- Using the “Track” mode ......................................................................................................................... 52
- Manage Trajectory with “Trajectories” ................................................................................................. 56
- Using the “Tune” Mode .......................................................................................................................... 57
- Using the “Playback” mode ................................................................................................................... 61
- Using Playback from Robot Program ................................................................................................... 63
Playback from a Nachi ................................................................................................................................... 63
Playback from a Kuka robot .......................................................................................................................... 64
- Specifications .................................................................................................................................... 65
- Technical Specifications ....................................................................................................................... 66
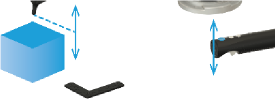
Transmitter dimensions & recommended range ......................................................................................... 67
An overview of the 4 different hemisphere options ..................................................................................... 67
Receiver dimensions ...................................................................................................................................... 68
- Controller (NRC-PT) Interface ............................................................................................................... 69
Controller interface - Front ............................................................................................................................. 69
Controller interface – Back ............................................................................................................................ 70
- Support and Troubleshooting ............................................................................................................. 71
- Support Requests .............................................................................................................................. 72