📘
マニュアル: KIT-TM-EQC20
説明
KIT-TM-EQC20は、ロボット上のEOAT(End Of the Arm Tool)を簡単に交換することができる「電気式クイックチェンジャー」です。
テックマンロボットのTM5/TM12/TM14用に特別に設計されており、KIT-TM-JおよびKIT-TM-Vキットと完全な互換性を持っています。
これらのキットは、手首に限定された電源供給機能を提供するあらゆる協働ロボットと組み合わせて使用することができます。
電源接続について
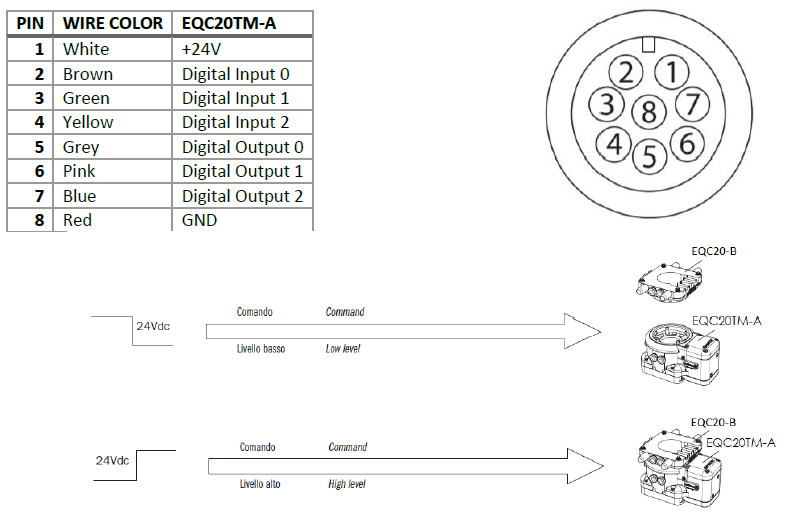
電動クイックチェンジャーには8極のM8オスコネクターが装備されており、ロック/アンロックのコマンドと、結合/非結合のシステム状態を識別するデジタル出力の接続に24VDC電源を供給します。
外部の電子制御システムを追加する必要はありません。(デジタルIOの制御のみで、通信確立などの作業が不要です)
ロボットツールフランジへの電気的接続
KIT-TM-EQC20では、2種類の接続方法を選択することができます。
- 手首コネクタにM8ケーブル1本で接続 この方法は、ツールチェンジャーと工具の両方に供給する、手首に接続された1本のケーブルのみを使用します。
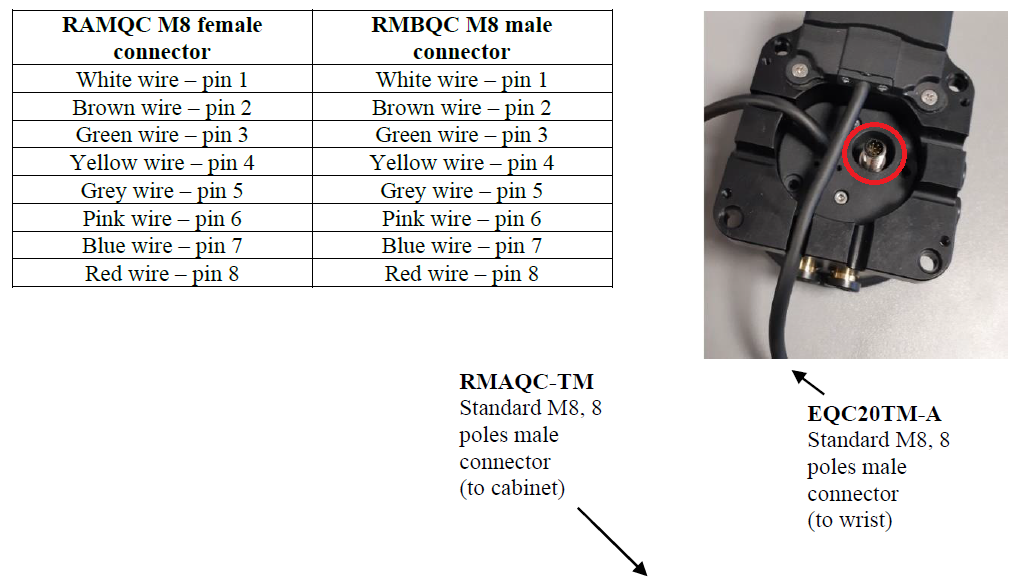
a) EQC20TM-A の M8 オスコネクタと RMAQC-TM の M8 メスコネクタを接続します。
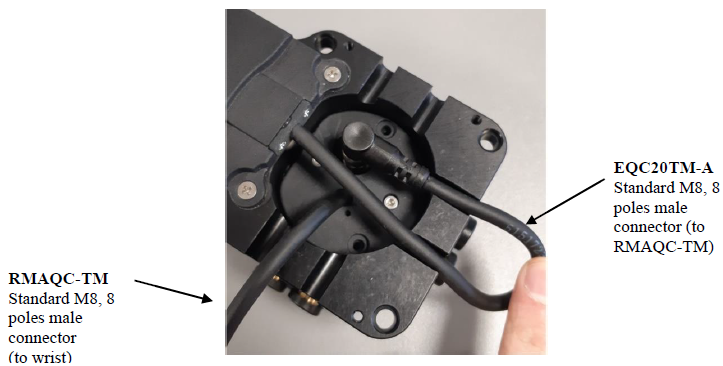
b) RMAQC-TM の M8 オスコネクタをロボットツールフランジの M8 メスコネクタに接続します。

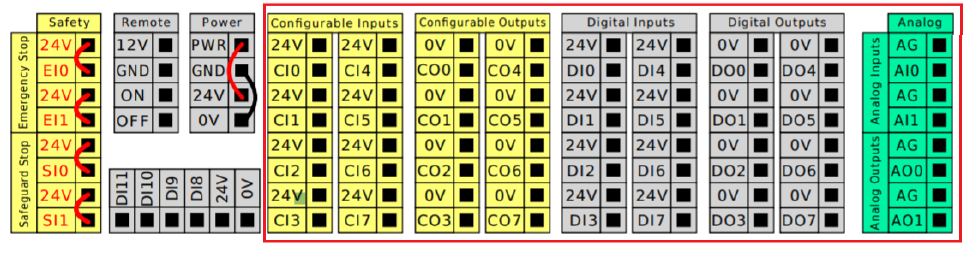
右の図は、TM協調ロボットの手首とKIT-TM-EQC20の出力にあるコネクタの電気接続図です。
- ツールチェンジャーのON/OFFは、デジタルアウトプット1を使います。
- ツールチェンジャーのロック確認を、デジタルインプット0で確認します。
- ツールチェンジャーのロック解除の確認を、デジタルインプット1で確認します。
- デジタルインプット2は、常時3.3Vdcがロボットに入力されるため、使用不可です。
- グリッパーの開閉は、デジタルアウトプット0と2が使用可能です。
2.コントロールボックスへRMAQC-TM、手首へEQC20TM-Aの接続
この方法は、ロボットの手首からツールチェンジャーを送り込み、ツールをコントロールボックスのI/Oに接続することができます。
a) EQC20TM-AのM8オスコネクタをロボットのツールフランジのM8メスコネクタに接続します。
右の図は、TM協調ロボットの手首とKIT-TM-EQC20の出力にあるコネクタの電気接続図です。
- ツールチェンジャーのON/OFFは、デジタルアウトプット1を使います。
- ツールチェンジャーのロック確認を、デジタルインプット0で確認します。
- ツールチェンジャーのロック解除の確認を、デジタルインプット1で確認します。
- デジタルインプット2は、常時3.3Vdcがロボットに入力されるため、使用不可です。
- グリッパーの開閉は、デジタルアウトプット0と2が使用可能です。
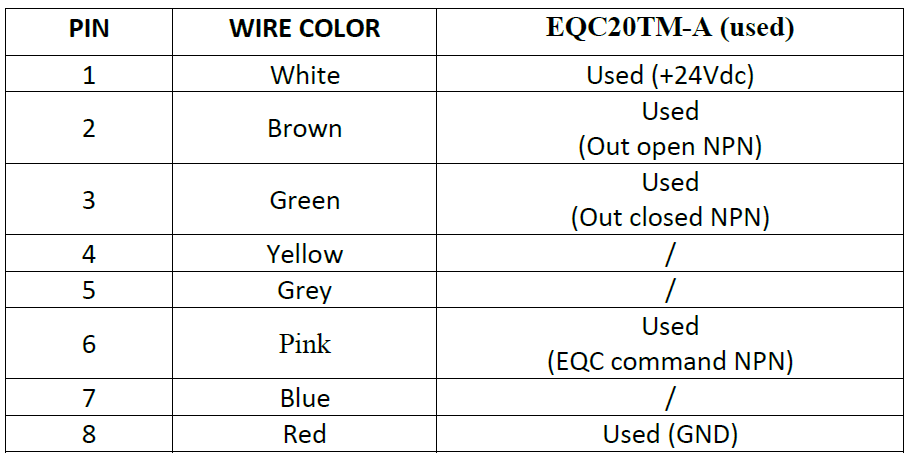
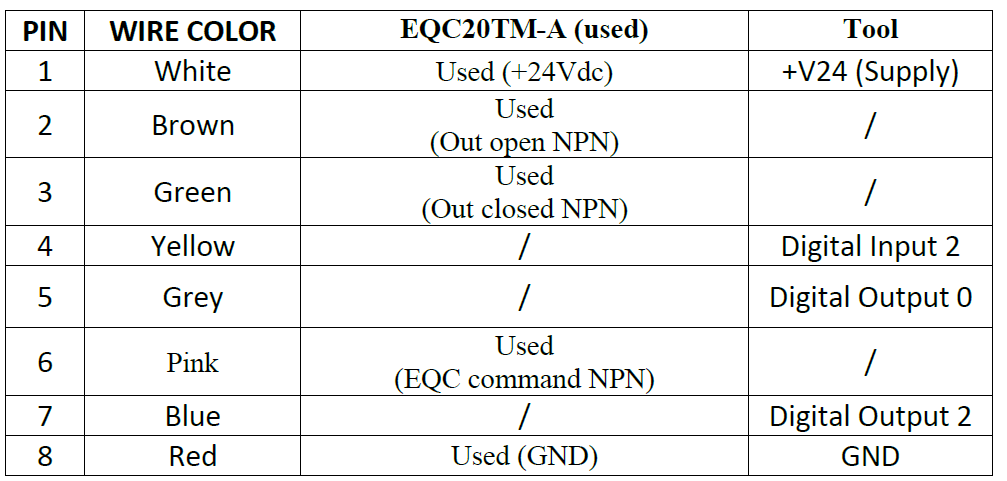
b) RMAQC-TM の M8 オスコネクタを以下のピン配置を考慮して、ロボットのキャビネット内の I/O コントロール ボックスに接続します。
配線の割り付け
- 白
- 茶色
- 緑
- 黄色
- 灰色
- ピンク
- 青
- 赤
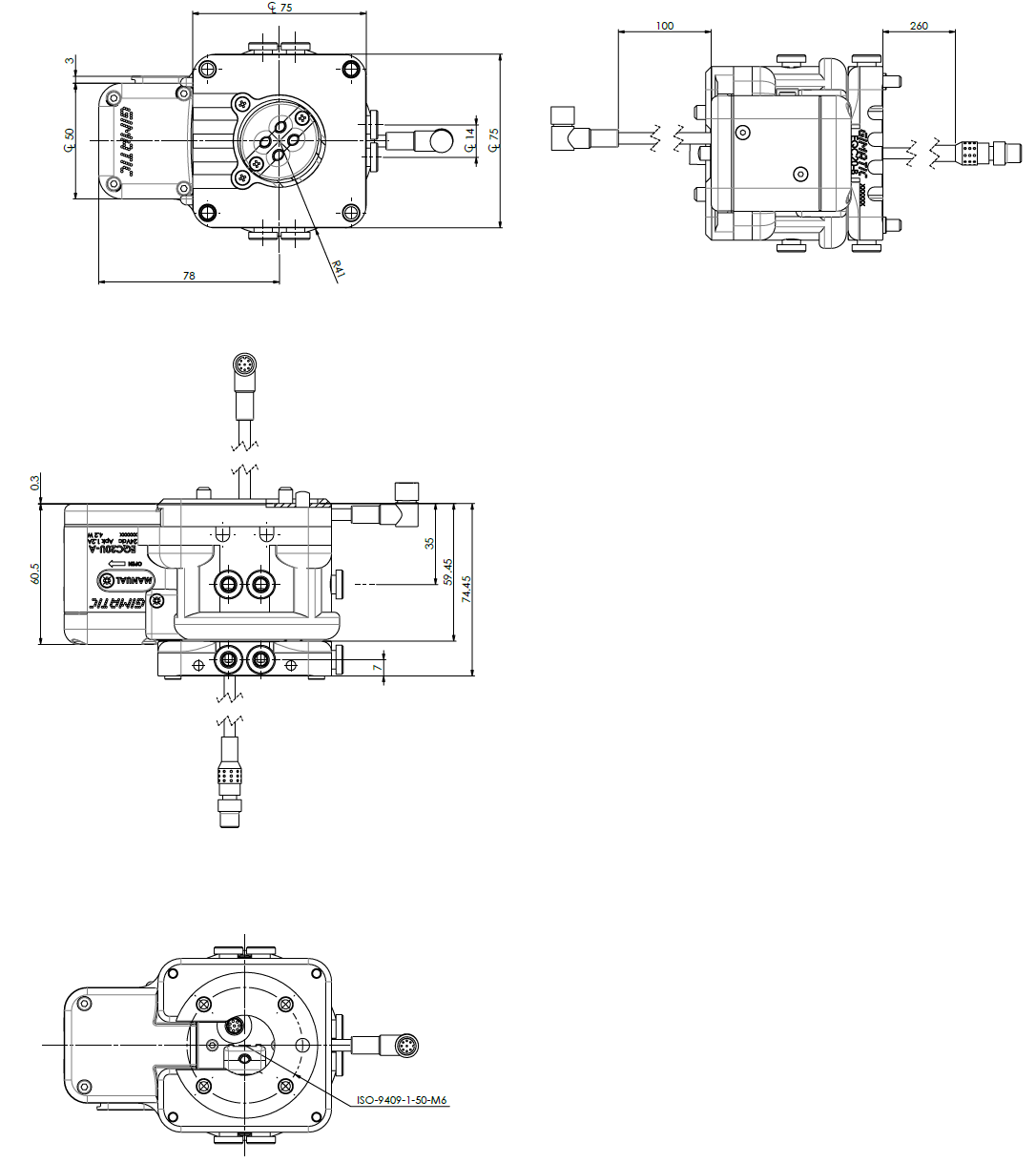
組立手順
- 電気接続モジュール(オプション)。RMAQC-TM をツールチェンジャー EQC20TM-A に下図のようにネジ(TCC M3x6)2本で固定します。
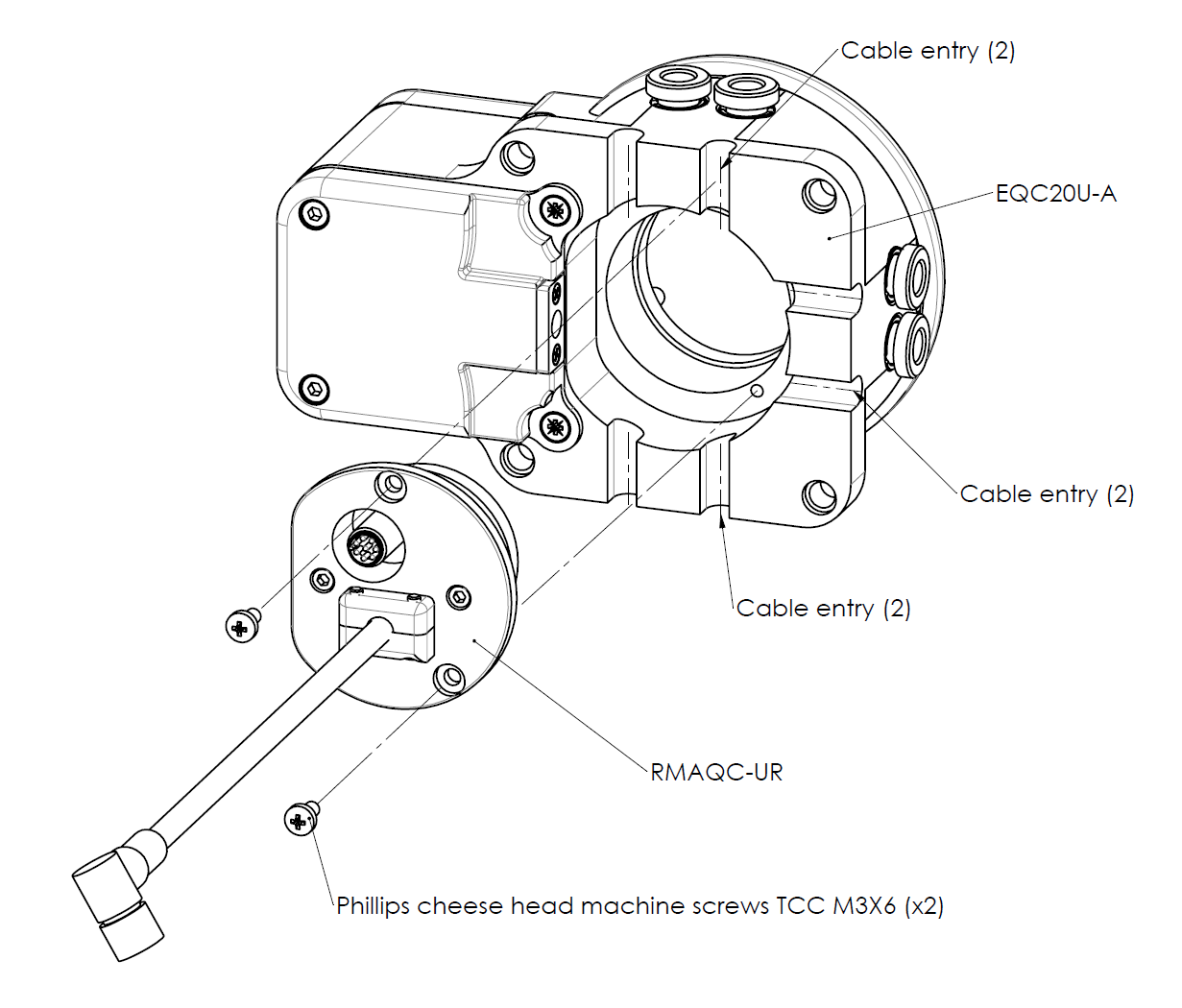
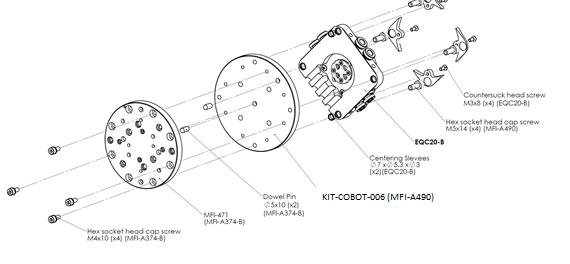
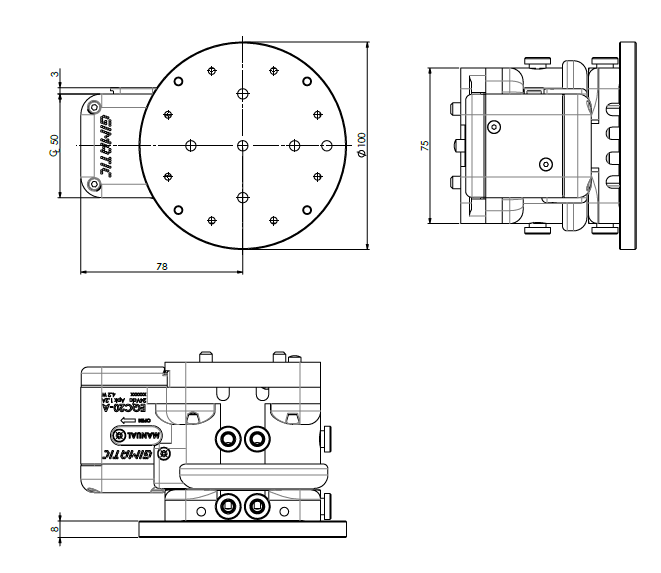
2. 位置決めピン(φ6x10)と4個の六角穴付きカップネジ (M6x10)を使ってロボットフランジにアダプタプレート (EQC20-019)を取付けます。
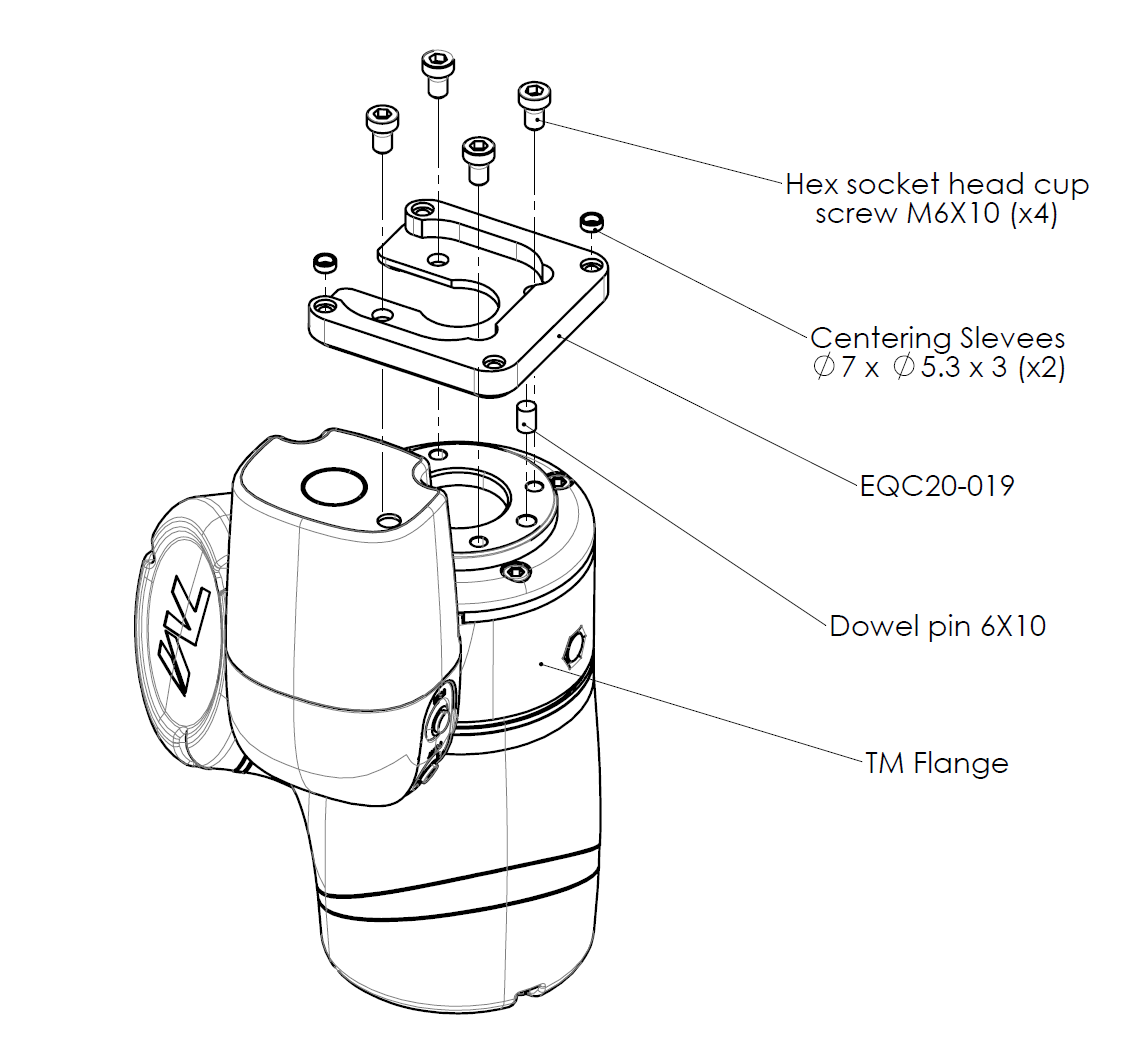
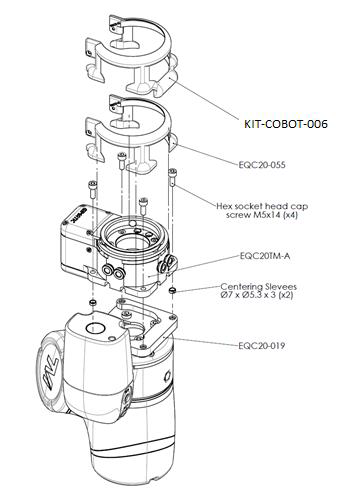
- その後、センタリングスリーブ(φ7xφ5.3x3)と4つの六角穴付きネジ (M5x14)を使って、ツールチェンジャーEQC20TM-Aをプレート (EQC20-019)に固定します。 a) "1) 電気接続ソリューション "を選択された場合は、カバー KIT-COBOT-006を装着してください。 b) "2) 電気接続ソリューション "を選択した場合は、カバーEQC20-055を取り付 けます。
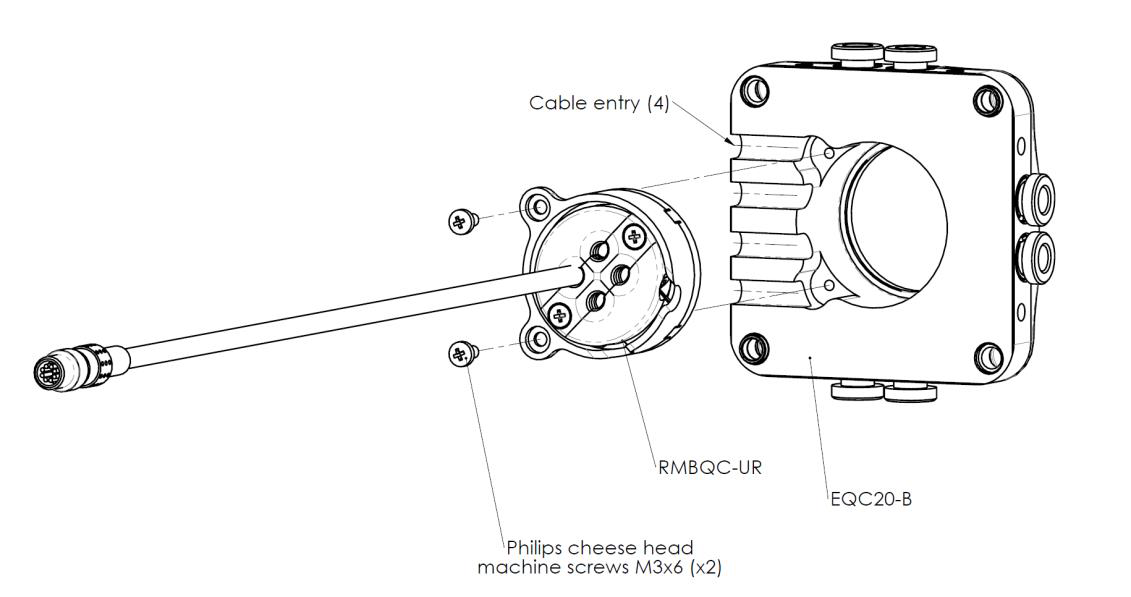
4. 電気接続モジュール(オプション)。RMBQC-TM をツールチェンジャー EQC20-B に下図のようにネジ(TCC M3x6)2本で固定します。
ここからは、取り付けるハンドによって、工程が変わってきます。
5a. は、KIT-TM-Vが対象です。
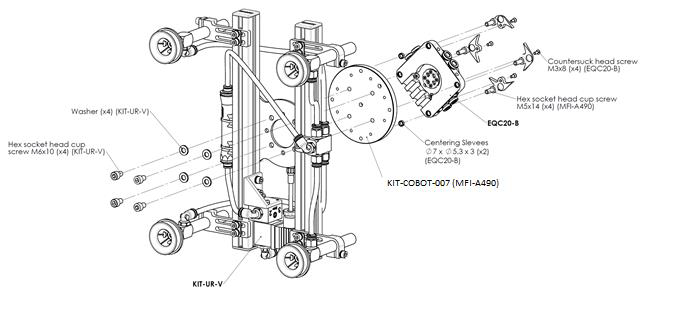
KIT-TM-VをプレートKIT-COBOT-007 (MFI-A490キット付属) にネジ4本で固定します。
その後、4本のネジ(VITE-048)と2つのセンタリングスリーブ (φ7xφ5.3x3)を使用して、プレート付きグリッパをツールチェンジャ ーフランジEQC20-Bに固定します。
最後に KIT-TM-V の M8 オス側と RMBQC-TM の M8 メス側を接続します。
5b. KIT-TM-Jが対象です。
KIT-TM-J に付属の固定プレート MFI-A374-B をプレート KIT-COBOT-007 (MFI-A490 キット同梱)に取り付け、キット-TM-J に同梱のネジ 4 本を使 用してグリッパを固定します。
その後、4本のネジ(VITE-048)と2つのセンタリングスリーブ (φ7xφ5.3x3)を使って、プレート付きグリッパをツールチェンジャ ーフランジEQC20-Bに固定します。
最後に KIT-TM-J の M8 オス側と RMBQC-TM の M8 メス側を接続します。
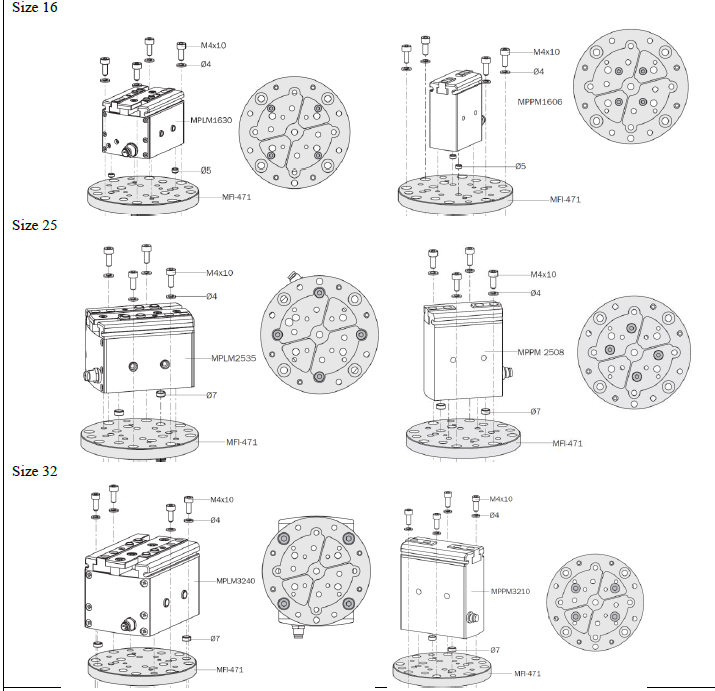
5c. 汎用の ジマテック製 電動 グリッパ (連携ソリューションなし)。
KIT-TM-EQC20-Bは、MFI-A374-BインターフェースおよびMFI-A490により、すべてのジマテック電動グリッパーと互換性があります。
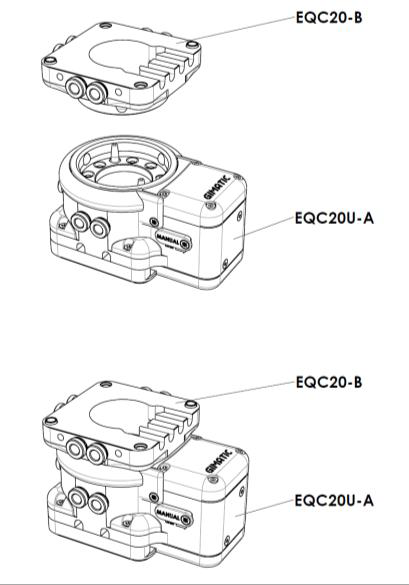
6. EQC20TM-AとEQC20-Bをジョイントし、「主電源接続」の項で説明したように、電気指令で機構部を閉じます。
注意事項
腐食性物質、はんだの飛沫、研磨粉などは電動クイックチェンジャーを損傷することがありますので、絶対に接触させないでください。
システムの動作範囲内に人や物を絶対に立ち入らせないでください。
本製品が搭載されている機械が、各国の安全規格に準拠していない場合は、本製品を絶対に操作しないでください。
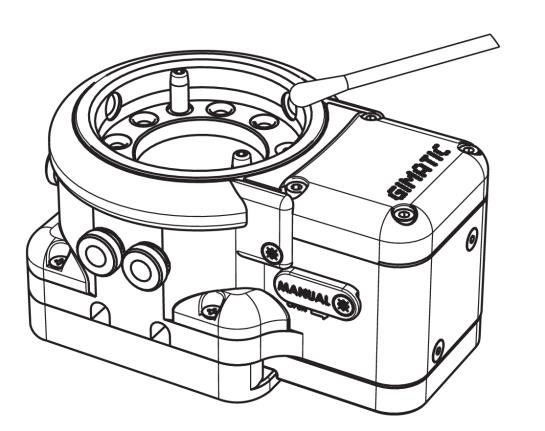
通常メンテナンス
装置を正しく動作させるために、一般的な綿棒を使用してボールシートの
定期的なクリーニングを行います。
ソフトウエア
ジマテックは、TMロボット専用のソフトウェアパッケージを提供しています。
このソフトウェアにより、ペイロードの割り当てやツールセントラルポイント(TCP)の更新が簡単に行えます。
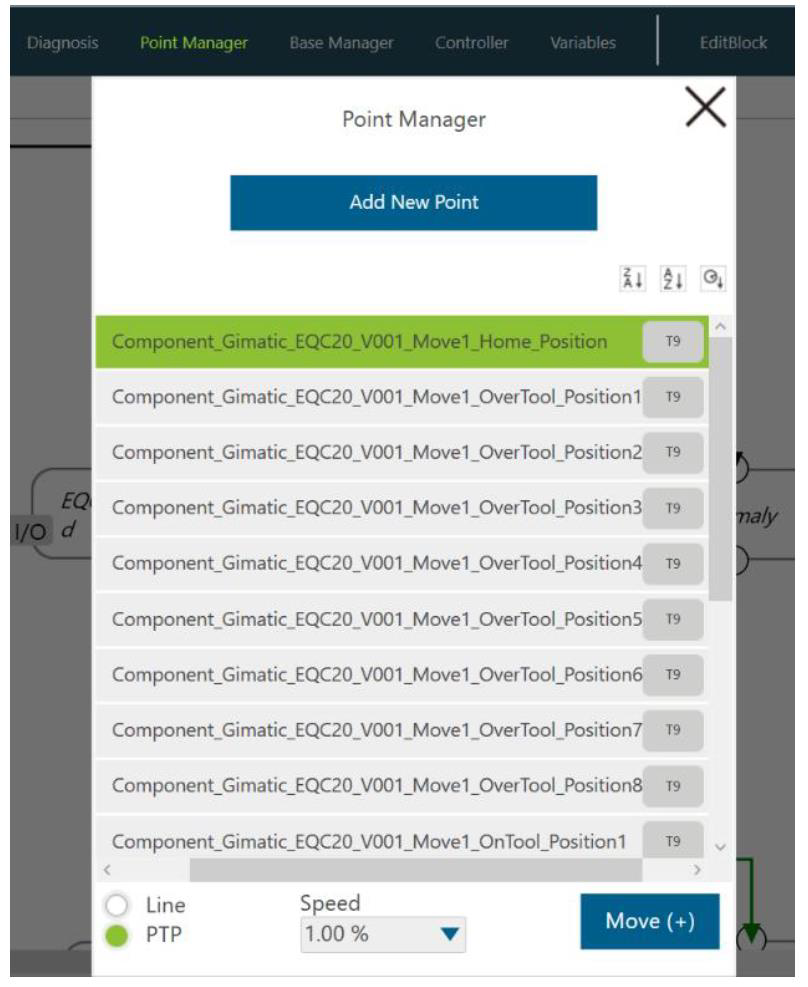
ダウンロードとインストール
- ジマテック社公式サイト https://shop.gimatic.com/jp/kit-robot より、「TM ソフトウェア」「ユーザーガイド」をダウンロードします。
- 圧縮されたフォルダを "TMROBOT "と書かれたUSBペンドライブにコピーし、ロボットコントローラの適切なポートに挿入する。
- 「KIT-TM-EQC20 User Manual」の指示に従い、ソフトウェアのインストールと設定を行ってください。
 特注コネクタ仕様(手首の5ピンコネクタ仕様)2022/7/1 9:322022/8/3 18:00
特注コネクタ仕様(手首の5ピンコネクタ仕様)2022/7/1 9:322022/8/3 18:00