📘
TM Plug& Play操作方法: PGCシリーズ
PGC Gripper TM Plug-in Start Guide
DH-Robotics
- プラグインソフトのインストール
Step1. ソフトウェアをインストールするには、グリッパーに付属している "TMROBOT"という名前のUSBメモリを使用します。
グリッパーに付属の USB メモリを使用します。TMのコントロールボックスに挿入してください。
Step2. 左上のメニューアイコンをクリックします。
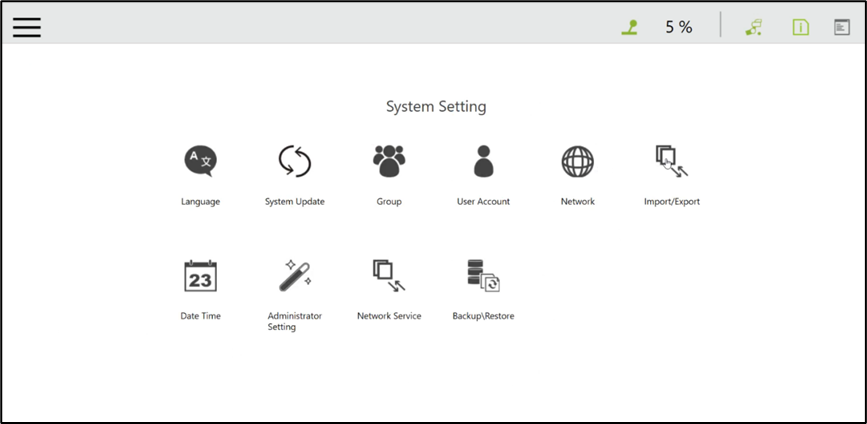
Step3. 左側の "System"を選択します。
Step4. システム設定の中の "Import/Export インポート/エクスポート"を選択します。
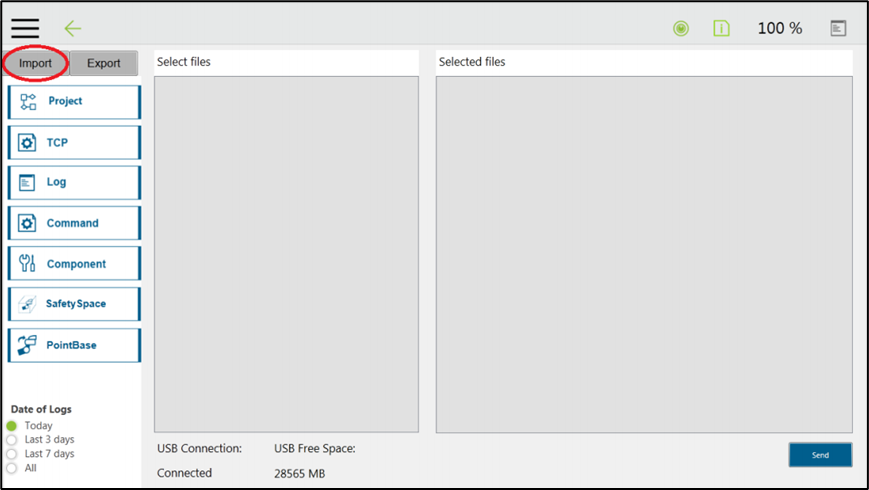
Step5. 下図のように "インポート "ボタンをクリックします。
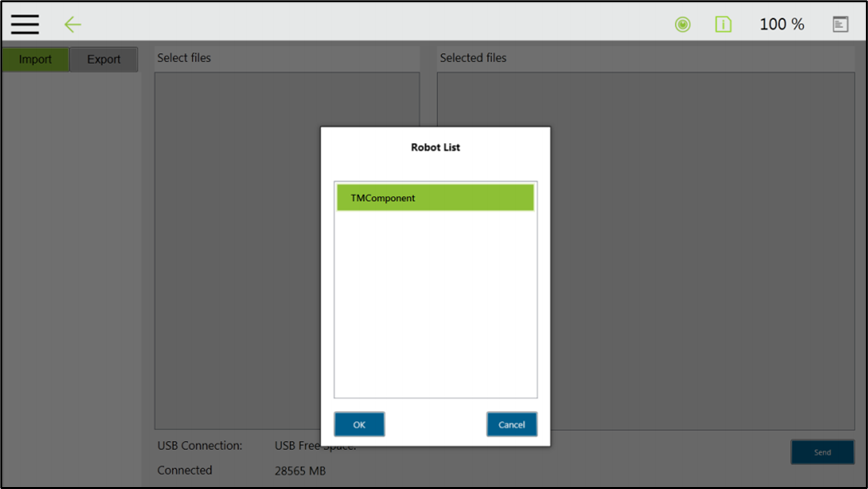
Step6. ロボット一覧から "TMComponent "を選択します。
Step7. 下の図のように "Component"ボタンをクリックします。
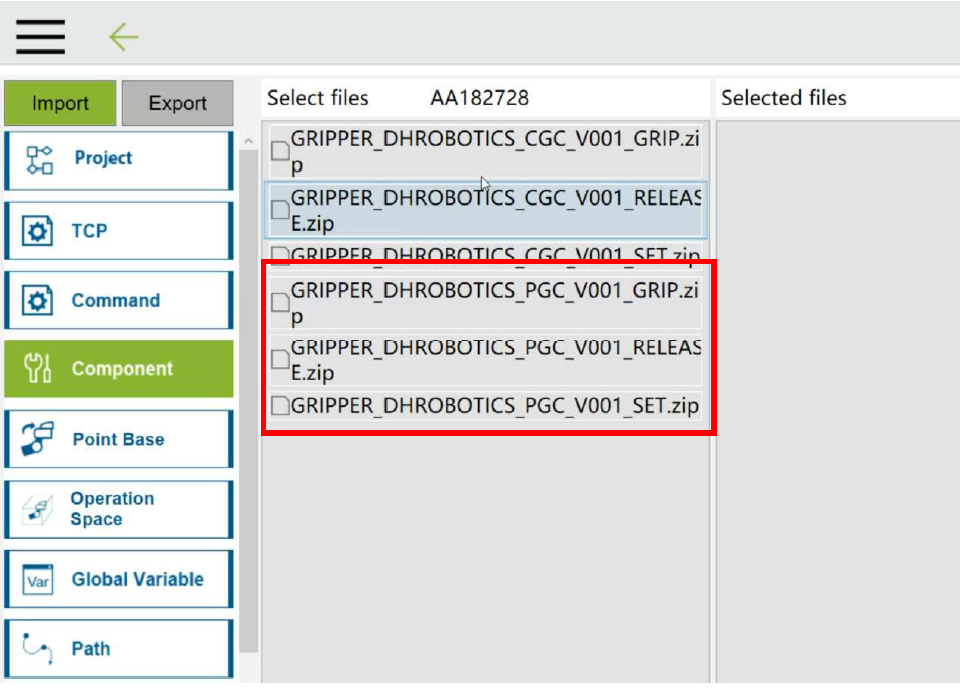
Step8. 必要なコンポーネントファイルを選択し、"Save "ボタンをクリックします。
→ PGCシリーズのコンポーネントファイルは途中に「PGC」と記載がある3つのファイル。
Step9. インポートが完了すると、インポート成功のメッセージボックスが表示されますので、"OK "を押して退出してください。
Step10. 左のメニューから "設定"を選択します。
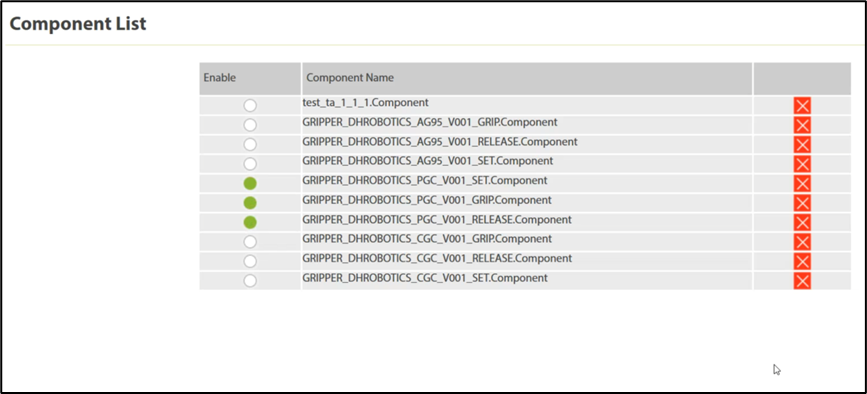
Step11. ロボット設定画面の "Component "を選択し、必要なコンポーネントリストを有効にして、"Save "ボタンを押して離れます。
Step12. プロジェクトを開いて、左のリストにある必要なコンポーネントをインポートするかどうか確認してください。
- Gripper ボタンの設定
Step1. ロボット設定画面の "Using Customized Component "で "Gripper Button "を選択し、"Grip "と "Release "を選択します。
Step2. グリッパーが初期化された後、エンドモジュールのグリッパーボタンでグリップとリリースコンポーネントを設定することができます。
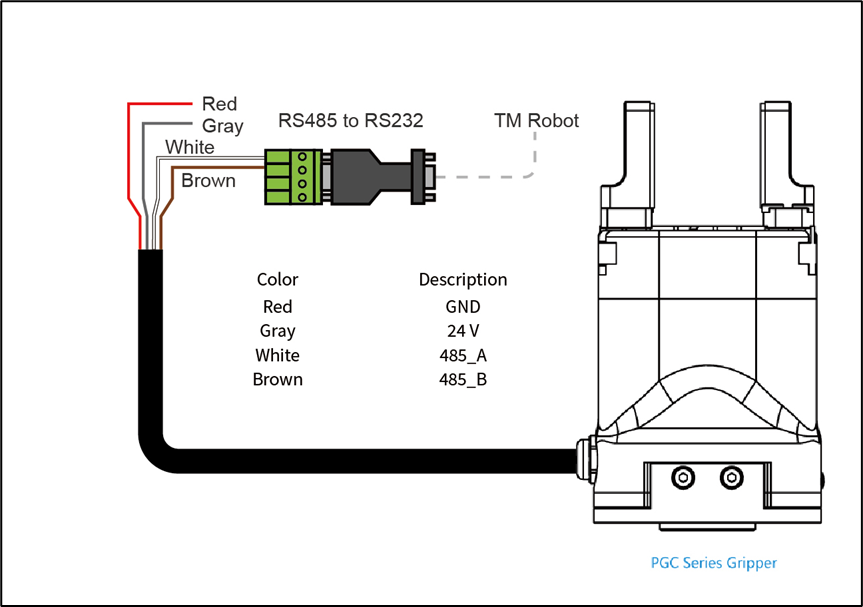
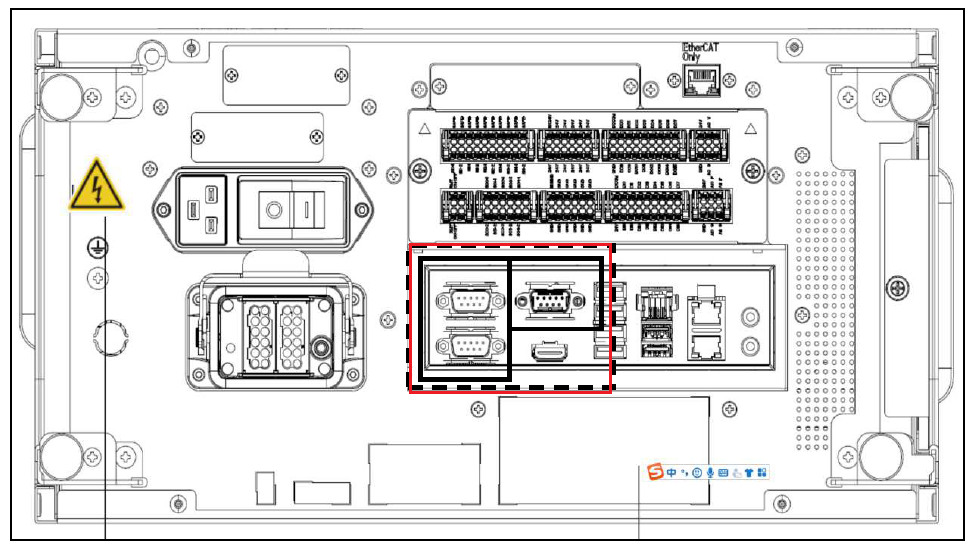
- ハードウェアの接続
- RS232のコネクションは、ロボットコントローラのキャビネット(赤い四角のマーク部)にあります。
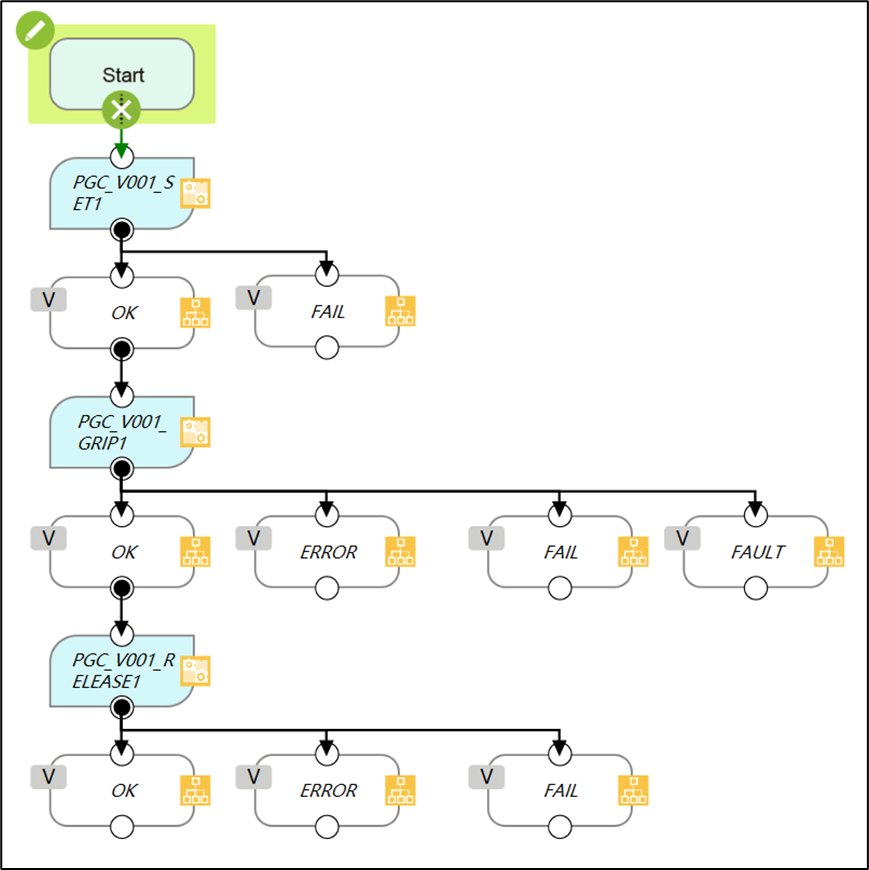
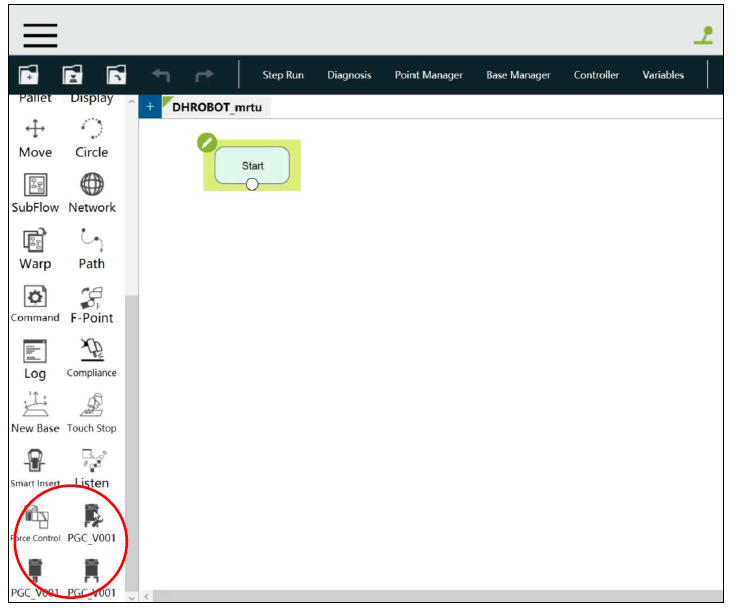
- Program the robot with the gripper nodes
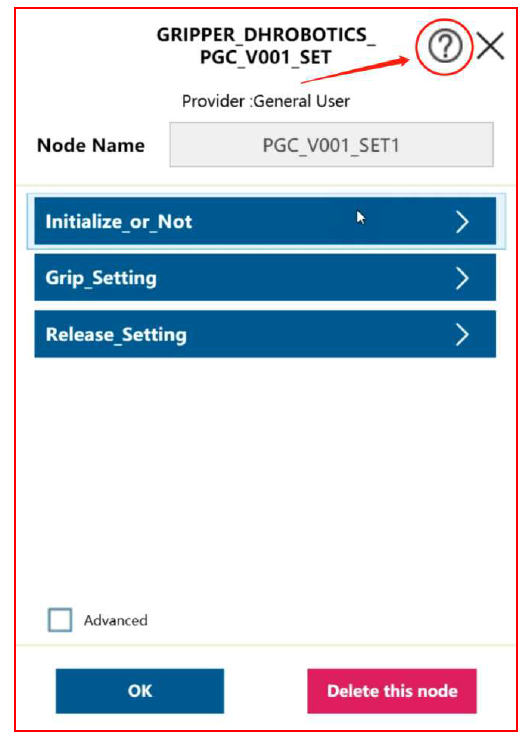
Step1. gripper-parameter-setノードを追加します.
Step2. ノードのパラメータを設定します.パラメータの設定方法は、下図のようにノード編集画面のクエスチョンマークをクリックすると表示されます。
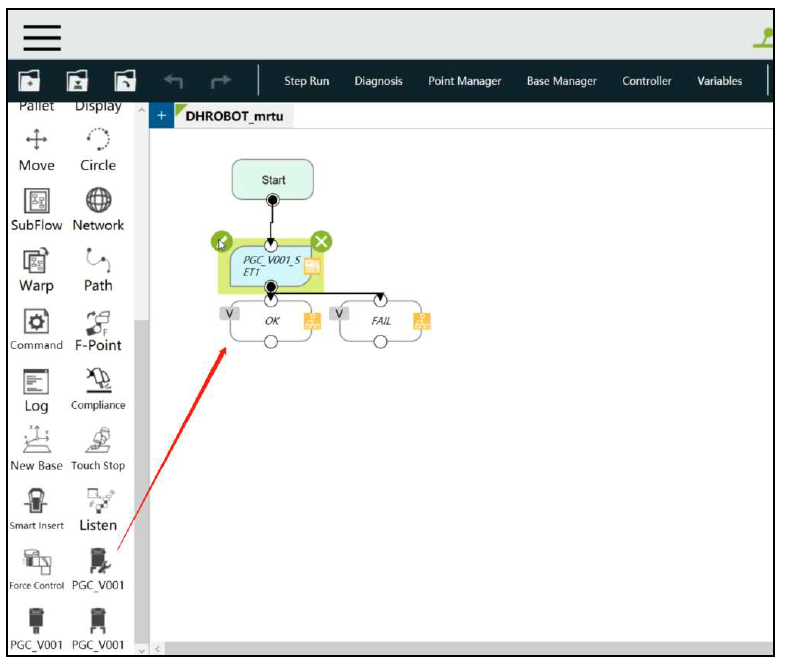
Step3. グリッパノードまたはリリースノードを追加します。対応するノードで、グリッピングまたはリリース動作が完了します。
Step4. ツールバーの右端にある「表示」をクリックし、周辺機器ウィンドウを呼び出します。
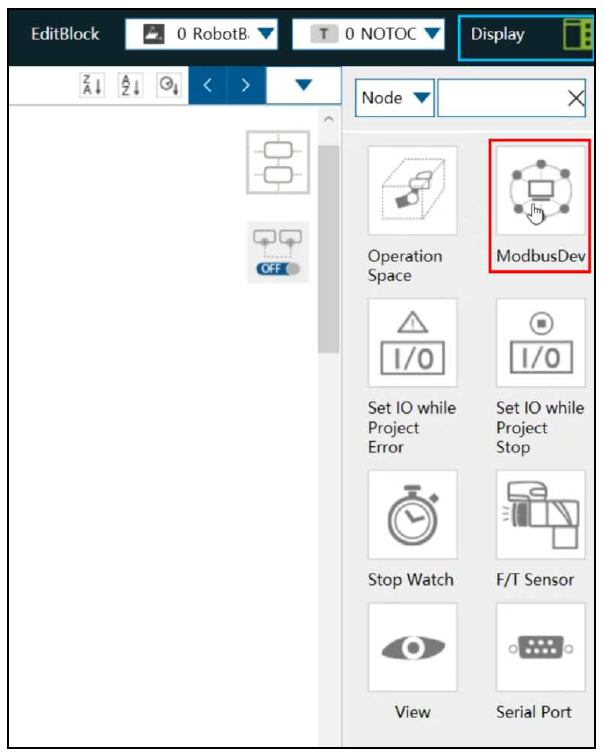
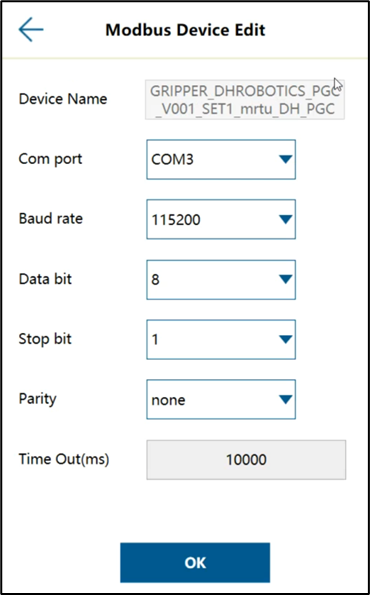
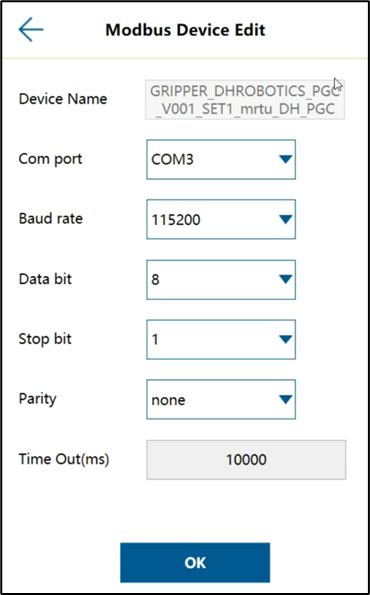
Step5. ModbusDev "をクリックし、Modbusデバイスの管理ウィンドウを開きます。
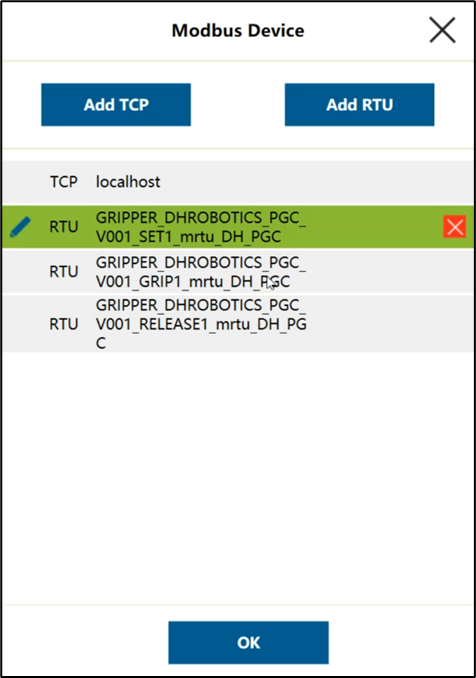
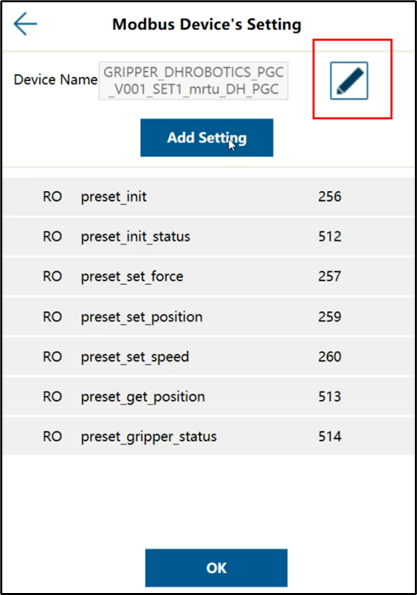
Step6. それぞれのノードの “Com port” を変更します。
簡単なプログラムの例